Multi-гипотеза, multi-sensor, многообъектный трекер
trackerTOMHT Система object™ представляет собой трекер с несколькими гипотезами, способный обрабатывать обнаружения множества целей от множества датчиков. Трекер инициализирует, подтверждает, прогнозирует, корректирует и удаляет дорожки. Входами в трекер являются отчеты об обнаружении, генерируемые objectDetection, fusionRadarSensor, irSensor, или sonarSensor объекты. Трекер оценивает вектор состояния и матрицу ковариации вектора состояния для каждой дорожки. Трекер назначает обнаружения, основываясь на ориентированном на дорожки подходе с несколькими гипотезами. Каждое обнаружение назначается, по меньшей мере, одной дорожке. Если обнаружение не может быть назначено какой-либо дорожке, трекер создает дорожку.
Любой новый трек начинается в предварительном состоянии. Если предварительной дорожке назначено достаточно обнаружений, ее статус изменяется на подтвержденный. Если обнаружение уже имеет известную классификацию ( ObjectClassID поле возвращаемой дорожки ненулевое), эта трасса подтверждается немедленно. Когда дорожка подтверждена, многообъектный трекер рассматривает дорожку как представляющую физический объект. Если обнаружения не назначены дорожке в пределах заданного количества обновлений, дорожка удаляется. Обзор функционирования трекера см. в разделе Алгоритмы.
Для отслеживания объектов с помощью трекера с несколькими гипотезами:
Создать trackerTOMHT и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
tracker = trackerTOMHTtrackerTOMHT Системный объект со значениями свойств по умолчанию.
tracker = trackerTOMHT(Name,Value)trackerTOMHT('FilterInitializationFcn',@initcvukf,'MaxNumTracks',100) создает многообъектный трекер, использующий фильтр Калмана с постоянной скоростью и допускающий максимум 100 дорожек. Заключите каждое имя свойства в кавычки.
Для обработки обнаружений и обновления треков вызовите трекер с аргументами, как если бы это была функция (описана здесь).
confirmedTracks = tracker(detections,time)detections, во время обновления, time. Подтвержденные дорожки корректируются и прогнозируются до времени обновления.
confirmedTracks = tracker(detections,time,costMatrix)costMatrix.
Чтобы включить этот синтаксис, установите HasCostMatrixInput свойство для true.
confirmedTracks = tracker(___,detectableBranchIDs)detectableBranchIDs.
Чтобы включить этот синтаксис, установите HasDetectableBranchIDsInput свойство для true.
[ также возвращает список предварительных дорожек, confirmedTracks,tentativeTracks,allTracks] = tracker(___)tentativeTracksи список всех треков, allTracks.
[ также возвращает информацию, confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)analysisInformation, полезно для анализа дорожек.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
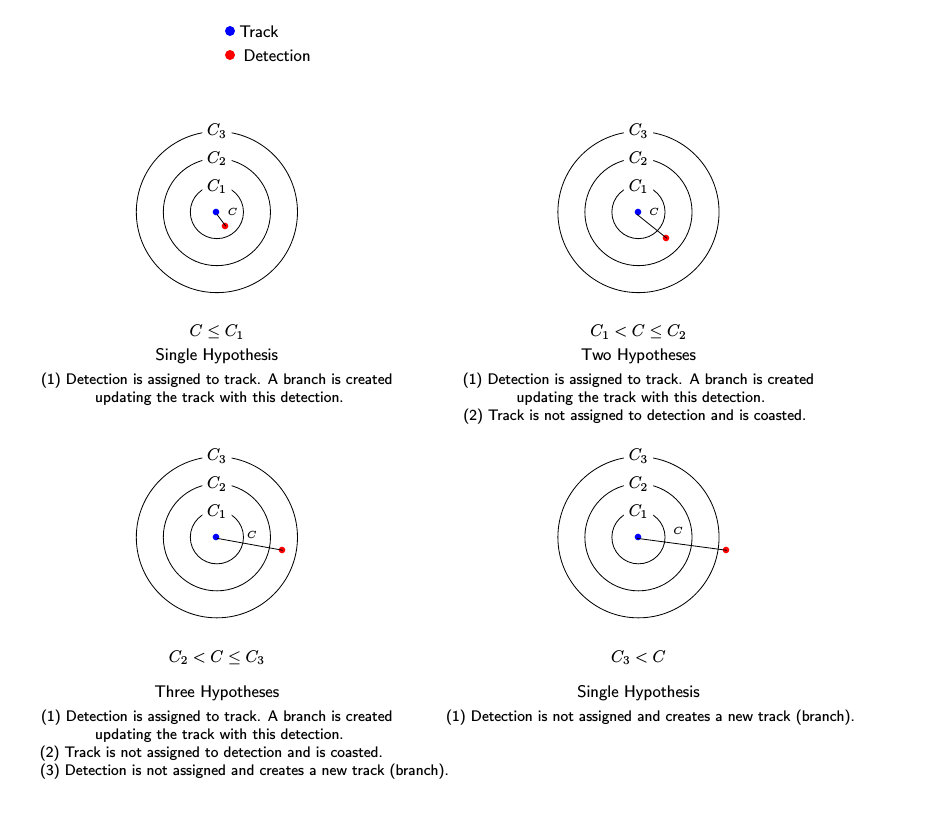
Три порога назначения, C1, C2 и C3, управляют (1) назначением обнаружения дорожке, (2) созданием новой ветви из обнаружения и (3) созданием новой ветви из неназначенной дорожки. Пороговые значения должны соответствовать: C1 < = C2 < = C3 .
Если стоимость присвоения равна C = costmatrix(i,j), следующие гипотезы создаются на основе сравнения стоимости со значениями пороговых значений назначения. Под каждым сравнением находится список возможных гипотез.
Совет:
Увеличьте значение C3, если есть обнаружения, которые должны быть назначены дорожкам, но не. Уменьшите значение, если есть обнаружения, которые назначены дорожкам, которым они не должны быть назначены (слишком далеко).
Увеличение значений C1 и C2 помогает контролировать количество создаваемых ветвей дорожки. Тем не менее, это уменьшает количество ветвей (гипотез), которые имеет каждая дорожка.
Чтобы отменить назначение каждой дорожки, установите значение C1 = 0.
Чтобы каждое обнаружение не назначалось, установите значение C2 = 0.
[1] Вертманн, Дж. Р. «Пошаговое описание вычислительно эффективной версии отслеживания множественных гипотез». В Международном обществе оптики и фотоники, т. 1698, стр. 228-301, 1992.
[2] Блэкман, С. и Р. Пополи. Проектирование и анализ современных систем слежения. Радарная библиотека Artech House, Бостон, 1999 год.
