Приложение Lidar Labeler позволяет маркировать данные о истинности земли в облаках точек. Для импорта данных можно использовать пользовательскую программу чтения. Сначала создайте пользовательскую функцию чтения. Затем загрузите пользовательскую функцию чтения и соответствующий источник данных облака точек в Lidar Labeler.
Укажите пользовательскую программу чтения в качестве дескриптора функции. Пользовательский модуль чтения должен иметь такой синтаксис.
outputPointCloud = readerFcn(sourceName,currentTimestamp)
readerFcn - имя пользовательской функции чтения.Пользовательская функция чтения загружает облако точек из sourceName, которая соответствует текущей отметке времени, указанной currentTimestamp. Например, предположим, что необходимо загрузить облако точек на третьей отметке времени для метки времени duration вектор, который работает от 1 до 5 секунд. Определить currentTimestamp, в командной строке MATLAB ® введите этот код.
timestamps = seconds(1:5); currIdx = 3; currentTimestamp = timestamps(currIdx);
outputPointCloud из пользовательской функции считывателя должен быть pointCloud объект.currentTimestamp - скалярное значение, соответствующее текущему кадру, выполняемому функцией.
Чтобы импортировать пользовательский источник данных в приложение, сначала создайте структуру. В этой структуре хранятся дескриптор функции и метки времени. Укажите пользовательский дескриптор функции чтения, считывающий данные, и метки времени.
sourceParams = struct(); sourceParams.FunctionHandle = readerFcn; sourceParams.Timestamps = timestamps;
Чтобы загрузить эту структуру в приложение, введите этот код в командной строке MATLAB.
lidarLabeler(sourceName,@sourceParams.FunctionHandle,sourceParams.Timestamps);
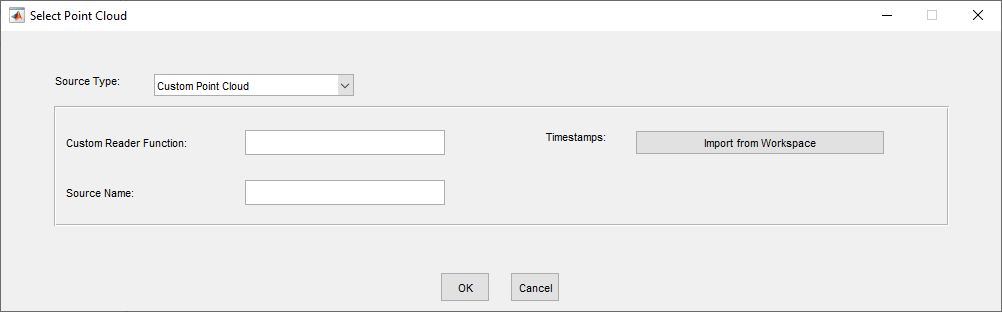
Либо на панели инструментов приложения Lidar Labeler выберите «Импорт» > «Добавить облако точек». Затем в диалоговом окне «Выбор облака точек» выберите Custom Point Cloud в качестве типа источника. Укажите пользовательскую функцию чтения в качестве дескриптора функции, а также укажите имя источника. Кроме того, необходимо импортировать соответствующие метки времени из рабочей области MATLAB.