Объект для хранения 3-D облака точек
pointCloud объект создает данные облака точек из набора точек в 3-D системе координат. Точки обычно представляют геометрические координаты x, y и z поверхности образца или среды. Каждая точка также может быть представлена дополнительной информацией, например цветом RGB. Данные облака точек сохраняются как объект со свойствами, перечисленными в списке «Свойства». Используйте функции объектов для извлечения, выбора и удаления требуемых точек из данных облака точек.
ptCloud = pointCloud(xyzPoints,Name,Value)pointCloud объект со свойствами, указанными как один или несколько Name,Value аргументы пары. Например, pointCloud(xyzPoints,'Color',[0 0 0]) устанавливает Color свойство точки xyzPoints как [0 0 0]. Заключите каждое имя свойства в кавычки. Все неопределенные свойства имеют значения по умолчанию.
Location - Положение точек в 3-D координатном пространствеЭто свойство доступно только для чтения.
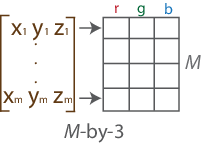
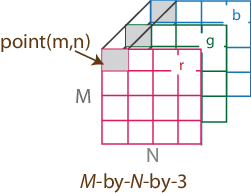
Положение точек в 3-D координатном пространстве, указанное как массив M-by-3 или M-by-N-by-3. Каждая запись задает координаты x, y и z точки в 3-D координатном пространстве. Нельзя задать это свойство как пару имя-значение. Используйте xyzPoints входной аргумент.
Для неорганизованных точечных облаков Location должен быть указан как массив M-by-3, где M - общее количество точек в облаке точек.
Для организованных точечных облаков Location должен быть указан как M-by-N-by-3 массив. Три канала представляют координаты x, y и z точек. Точки, полученные с проективной камеры, такой как Kinect ® или лидарный сенсор, сохраняются как организованное облако точек.
Типы данных: single | double
Color - Цвет облака точек[ ] (по умолчанию) | массив M-by-3 | массив M-by-N-by-3Цвет облака точек, заданный как M-by-3 или M-by-N-by-3 массив. Это свойство используется для задания цвета точек в облаке точек. Каждая запись определяет RGB-цвет точки в данных облака точек. Поэтому можно задать один и тот же цвет для всех точек или другой цвет для каждой точки.
Указанные значения RGB должны находиться в диапазоне [0, 1] при указании типа данных для Color как single или double.
Указанные значения RGB должны находиться в диапазоне [0, 255] при указании типа данных для Color как uint8.
| Координаты | Действительное назначение Color | |
| M-by-3 массив | Массив M-by-3, содержащий значения RGB для каждой точки |
|
| M-by-N-by-3 массив | Массив M-by-N-by-3, содержащий значения RGB для каждой точки |
|
Типы данных: uint8
Normal - Нормали поверхности[ ] (по умолчанию) | массив M-by-3 | массив M-by-N-by-3Нормали поверхности, заданные как массив M-by-3 или M-by-N-by-3. Это свойство используется для задания вектора нормали по отношению к каждой точке в облаке точек. Каждый элемент нормалей поверхности определяет компонент x, y и z вектора нормали.
| Координаты | Нормали поверхности |
|---|---|
| M-by-3 массив | M-by-3 массив, где каждая строка содержит соответствующий нормальный вектор. |
| M-by-N-by-3 массив | Множество M на Н на 3, содержащее нормальный вектор 1 на 1 на 3 для каждого пункта. |
Типы данных: single | double
Intensity - Интенсивности в градациях серого[ ] (дефолт) | вектор M-1 | матрица M на НИнтенсивности в градациях серого в каждой точке, определенные как M-by-1 вектор или матрица M-by-N. Функция сопоставляет каждое значение интенсивности со значением цвета в текущей карте цветов.
| Координаты | Интенсивность |
|---|---|
| M-by-3 массив | M-by-1 вектор, где каждая строка содержит соответствующее значение интенсивности. |
| M-by-N-by-3 массив | Матрица M-by-N, содержащая значение интенсивности для каждой точки. |
Типы данных: single | double | uint8
Count - Количество балловЭто свойство доступно только для чтения.
Количество точек в облаке точек, сохраненных как положительное целое число.
XLimits - Диапазон координат xЭто свойство доступно только для чтения.
Диапазон координат вдоль оси X, сохраненный как вектор 1 на 2.
YLimits - Диапазон координат yЭто свойство доступно только для чтения.
Диапазон координат по оси y, хранящийся в виде вектора 1 на 2.
ZLimits - Диапазон координат zЭто свойство доступно только для чтения.
Диапазон координат по оси Z, сохраненный как вектор 1 на 2.
findNearestNeighbors | Поиск ближайших соседей точки в облаке точек |
findNeighborsInRadius | Поиск соседей в радиусе точки в облаке точек |
findPointsInROI | Поиск точек в интересующей области в облаке точек |
removeInvalidPoints | Удаление недопустимых точек из облака точек |
select | Выбор точек в облаке точек |
copy | Копировать массив объектов-дескрипторов |
Считывание 3-D точек координат в рабочее пространство.
load('xyzPoints');Создайте объект-облако точек на основе координат входных точек.
ptCloud = pointCloud(xyzPoints);
Проверьте свойства объекта-облака точек.
ptCloud
ptCloud =
pointCloud with properties:
Location: [5184x3 single]
Count: 5184
XLimits: [-3 3.4338]
YLimits: [-2 2]
ZLimits: [0.0016 3.1437]
Color: []
Normal: []
Intensity: []
Отображение облака точек с помощью pcshow.
pcshow(ptCloud)

Изменение цвета данных облака точек
Создайте цветовой массив RGB того же размера, что и размер данных облака точек. Установите цвета точек на Красный.
cmatrix = ones(size(ptCloud.Location)).*[1 0 0];
Создайте объект-облако точек со свойством color, установленным в цветовой массив RGB.
ptCloud = pointCloud(xyzPoints,'Color',cmatrix);
pcshow(ptCloud)
Добавление нормалей поверхности к данным облака точек
Вычисление нормалей поверхности, соответствующих данным облака точек, с помощью pcnormals.
normals = pcnormals(ptCloud);
Создание объекта-облака точек на основе координат входных точек. Добавьте вычисленные нормали поверхности к объекту-облаку точек.
ptCloud = pointCloud(xyzPoints,'Normal',normals);Отображение облака точек и печать нормалей поверхности.
pcshow(ptCloud) x = ptCloud.Location(:,1); y = ptCloud.Location(:,2); z = ptCloud.Location(:,3); u = normals(:,1); v = normals(:,2); w = normals(:,3); hold on quiver3(x,y,z,u,v,w); hold off

pointCloud объект является handle объект. Если требуется создать отдельную копию облака точек, можно использовать MATLAB
®copy способ.
ptCloudB = copy(ptCloudA) |
Если требуется сохранить одну копию облака точек, которую можно изменить с помощью функций облака точек, используйте одно и то же имя переменной облака точек для ввода и вывода.
ptCloud = pcFunction (ptCloud) |