Вычислить коэффициент снижения
Блок управления двигателем/элементы управления/контроллеры
Блок Derating Function генерирует коэффициент снижения (y) в соответствии с отзывами (ffeedback) и максимальный предел (fmax) значения входного опорного сигнала.
Коэффициент снижения:
Остается равным единице, когда ffeedback лежит между положительным и отрицательным значениями порога снижения. Коэффициент снижения изменяется линейно за пределами этого диапазона в соответствии с ffeedback.
Остается равным нулю, когда опорный сигнал находится за пределами (положительный или отрицательный) fmax.
Поэтому можно использовать генерируемый коэффициент снижения, чтобы понизить управляющий сигнал после того, как опорный сигнал преодолеет заданный порог снижения.
На этом рисунке показан выходной сигнал блока при использовании синусоидальной волны в качестве ffeedback.
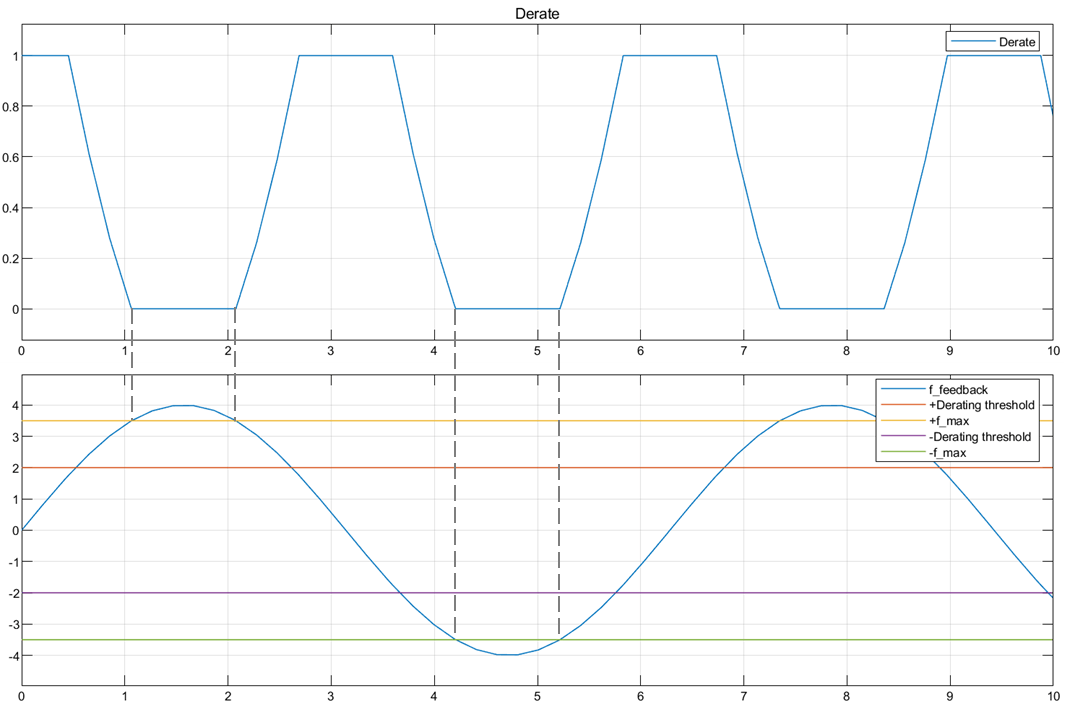
Пороговый параметр x Derating указывает процент пиковой амплитуды для опорного сигнала. Пороговое значение Derating равно 0,5 на показанном выходе блока, что приводит к пороговому значению 2 (для значения пиковой амплитуды 4 для синусоидального опорного сигнала).
0,1)
Это уравнение описывает, как блок вычисляет коэффициент отклонения (y).
− x) fmax
Ссылка на управление MTPA | Устройство оценки крутящего момента PMSM | Измерение скорости | Ссылка на управление вектором

