Программный решатель второго порядка
coneprog функция - это решатель программирования конуса второго порядка, который находит минимум задачи, указанный в
с учетом ограничений
A⋅x≤bAeq⋅x=beqlb≤x≤ub.
f, x, b, beq, lb и ub - векторы, а A и Aeq - матрицы. Для каждого i матрица Asc (i), векторы dsc (i) и bsc (i) и скаляр γ (i) находятся в ограничении конуса второго порядка, которое создается с помощьюsecondordercone.
Дополнительные сведения об ограничениях конуса см. в разделе Ограничение конуса второго порядка.
x = coneprog(f,socConstraints)socConstraints закодировано как
Asc (i) =socConstraints.A(i)
bsc (i) =socConstraints.b(i)
dsc (i) =socConstraints.d(i)
γ (i) =socConstraints.gamma(i)
Почему ограничение
называется ограничением конуса второго порядка? Рассмотрим конус в 3-D пространстве с эллиптическими поперечными сечениями в плоскости x-y и диаметром, пропорциональным координате z. Координата y имеет масштаб ½, а координата x - масштаб 1. Неравенство, определяющее внутреннюю часть этого конуса с его точкой в [0,0,0], равно
В coneprog , этот конус имеет следующие аргументы.
A = diag([1 1/2 0]); b = [0;0;0]; d = [0;0;1]; gamma = 0;
Постройте график границы конуса.
[X,Y] = meshgrid(-2:0.1:2); Z = sqrt(X.^2 + Y.^2/4); surf(X,Y,Z) view(8,2) xlabel 'x' ylabel 'y' zlabel 'z'
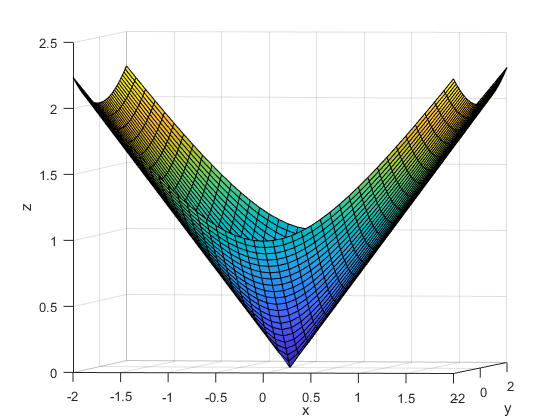
b и gamma аргументы перемещают конус. A и d аргументы поворачивают конус и изменяют его форму.
Алгоритм использует метод внутренней точки. Дополнительные сведения см. в разделе Алгоритм программирования конуса второго порядка.
Задача «Оптимизировать интерактивный редактор» обеспечивает визуальный интерфейс для coneprog.
linprog | Оптимизировать | quadprog | secondordercone | SecondOrderConeConstraint
