Тела являются основными составляющими многозначной модели. Они являются твердыми компонентами, которые вы соединяете при сборке модели и субъектов, на которых в конечном итоге действуют все силы и моменты в этой модели. Планеты и солнце служат телами в модели Солнечной системы, например, и крылья тоже в модели хлопающего механизма.
Механизм откидывания как сборка тел

Если вы знакомы с CAD-моделированием, можно свободно рассматривать тела как эквиваленты CAD-деталей, каждая из которых представляет собой модульный компонент с геометрией и материалом. Подход к моделированию может отличаться - например, нет эскизов для рисования - но концептуально конечный результат тот же: что-то, что можно соединить, ограничить, действовать и визуализировать.
Тело - это (обычно жёсткая) коллекция более простых элементов тела: твёрдые тела с геометрией и инерцией и, реже, простые инерции (без назначенных геометрий) и простые геометрии (без связанных инерций). Моделируемые элементы тела и способы их соединения определяют общие атрибуты тела.
Тела с простыми формами часто требуют одного тела. Для объектов со сложными формами или инерциями может потребоваться несколько твердых тел и случайная инерция или геометрия. Как и кирпичи в модульном наборе построений, свойства различных элементов кузова могут отличаться друг от друга. Вы должны объединить их таким образом, чтобы создать желаемое тело.
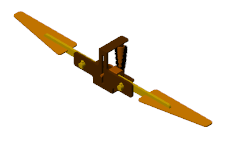
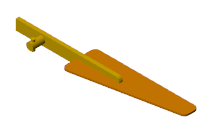
Тело крыла как совокупность твердых тел
Каждый корпусной элемент содержит одну или более рам и набор атрибутов материала. Рамы определяют расположение элементов корпуса относительно друг друга и обеспечивают точки присоединения для соединений и зависимостей. Коэффициент атрибутов в динамическом поведении элементов тела, а в элементах с геометрией помогает определить их визуальный вид.
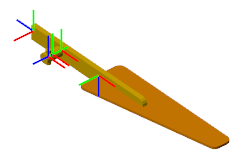
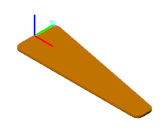
Рамки на корпусе крыла
Атрибуты твердых тел включают инерцию и цвет. Геометрия позволяет автоматически вычислять параметры инерции и, в сочетании с цветом, визуализировать. Инерция количественно определяет сопротивление изменениям в движении и коэффициент при вычислении сил и моментов, необходимых для индукции ускорения.
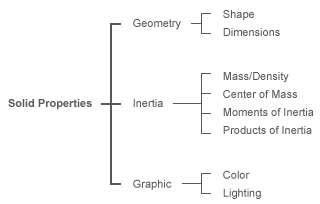
Атрибуты других элементов тела более ограничены по объему. Простые инерции включают только инерцию с параметрами, которые в общем случае охватывают массу, центр масс, моменты инерции и продукты инерции.
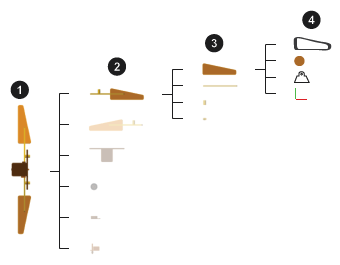
На рисунке обобщена структура типичного тела (здесь крыло) в контексте типичной многофюзеляжной модели (здесь хлопающий механизм крыла). Многокорпусные узлы (1) содержат тела (2), тела содержат тела (3) - часто все тела - и элементы тела содержат рамы и любые относящиеся к ним атрибуты материала (4).
Большинство тел можно моделировать с помощью твердотельных блоков и блока жесткого преобразования. Сплошные блоки представляют своего тезку - сплошной элемент определённого типа. Параметры блока задают атрибуты твердого тела, а порт рамы с меткой R обеспечивает опорную рамку для соединения с моделью. Можно создавать дополнительные пользовательские рамки и размещать их с помощью различных твердотельных элементов.
Блок «Жесткое преобразование» представляет фиксированную пространственную взаимосвязь между двумя кадрами. При каждом добавлении блока «Жесткое преобразование» к линии соединения рамы взаимосвязь совпадения, первоначально заданная этой линией, заменяется вращательным и поступательным смещением, заданным в диалоговом окне блока.
![]()
Лишь редко тела содержат другие блоки. Те из них, которые остаются в библиотеке Body Elements - Graphic, Inertia и все в поддиапазоне Variable Mass - обслуживают особые случаи. Они используются, например, для добавления графических маркеров, корректировки инерции путем объединения или для изменения инерции во время моделирования.
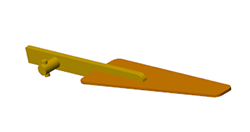
Можно визуализировать отдельные тела и полные модели. Нужный инструмент визуализации зависит от того, какие из них требуется визуализировать. Можно визуализировать отдельные тела непосредственно через соответствующие твердотельные блоки. В диалоговом окне «Твердотельные блоки» имеется панель визуализации, на которой отображаются геометрия, рамки и цвет представляемого твердого тела. Визуализация работает, даже если блок-схема является неполной или недопустимой.
Типичная визуализация твердого тела
Можно визуализировать модель и все тела в ней с помощью утилиты визуализации Simscape Multibody, Mechanics Explorer. Модель должна быть свободной от кинематических конфликтов, например, из-за взаимных несовместимых соединений и ограничений. Он также должен содержать один блок конфигурации решателя для каждой топологически отличной многожильной сети - каждой группы блоков Simscape Multibody, которые соединяются без разрывов в линиях соединения кадров.
Обозреватель Mechanics открывает статическую визуализацию модели в начальной конфигурации при каждом обновлении диаграммы (на вкладке Отладка (Debug) щелкните Обновить модель (Update Model)). Начальная конфигурация является совокупным результатом всех исходных позиций и углов соединения, значения которых можно задать с помощью целей состояния соединения. Визуализация становится динамической при выполнении моделирования, хотя эта задача вряд ли будет выполнена при моделировании тел.
Типичная визуализация модели
Дополнительные сведения о визуализации см. в разделе Визуализация модели и ее компонентов.
В командной строке MATLAB введите sm_cam_flapping_wing. Открывается модель хлопающего механизма крыла. Загляните внутрь маски блока подсистемы с именем RightWing. Для этого щелкните стрелку вниз в левом нижнем углу блока. Блоки внутри подсистемы являются типичным представлением тела.
Каждый из сплошных блоков представляет собой участок корпуса крыла. Линии соединения каркаса между твердотельными блоками и блоками жесткого преобразования, которые содержат некоторые из соединительных линий, определяют пространственные отношения, существующие между твердотельными сечениями. Открытие диалогового окна блока «Цилиндрическое тело» с именем CrossPin и изучить его атрибуты:
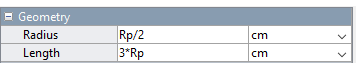
Параметры геометрии по умолчанию развернуты. Блок цилиндрического тела использует форму с соответствующими размерами (радиус, длина), параметризованными в терминах переменных MATLAB (Rp, Lp). Все переменные определяются численно в маске подсистемы.

Разверните параметры инерции. Блок конфигурируется для вычисления основной части параметров инерции по геометрии и массовому параметру (Плотность). Этот параметр также параметризуется в терминах переменной MATLAB (rho).

Разверните раздел Графические параметры. Блок использует Simple цветовая модель с визуальными свойствами твердого тела (цвет, непрозрачность), параметризованными в терминах переменных MATLAB (lclr) или указано численно (1.0).

На панели инструментов визуализации нажмите кнопку «Рамка». На панели визуализации отображаются кадры, связанные с твердым телом. Это твердое тело имеет одну рамку, локальную опорную рамку, которую по умолчанию имеет каждый твердотельный блок. Размещение этого каркаса относительно геометрии влияет на размещение геометрии в контексте модели.
Обновите блок-схему. Откроется Mechanics Explorer со статической визуализацией модели лопнувшего крыла в его начальной конфигурации. На панели древовидного представления (расположенной в левой части окна Mechanics Explorer) щелкните правой кнопкой мыши узел «Правое крыло» и выберите Show Only This. Панель визуализации обновляется и отображает только те элементы тела, которые составляют выбранный компонент.
Прямые линии соединения и блоки жесткого преобразования объединяют элементы тела в единое тело. Такие соединения рассматриваются как внутренние по отношению к телам, к которым они принадлежат. Блоки соединений и зависимостей, в свою очередь, разделяют тела на различные тела. Эти блоки определяют границы тел, которые они соединяют. Это различие имеет практические последствия в моделях с блоками гравитационного поля.
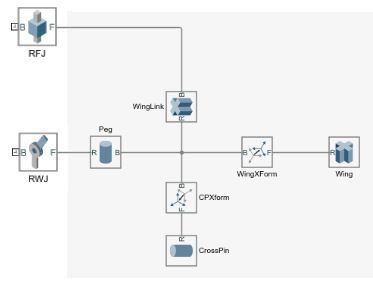
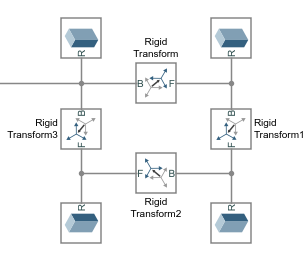
На рисунке показана уплощенная часть sm_cam_flapping_wing блок-схема. Блоки соединения с именемRFJ и RWJ отделяют блоки, составляющие тело справа (идентифицируемые затененной областью), от соседних тел, с которыми оно соединяется (не показаны).
По конструкции блок «Гравитационное поле» оказывает силу на центр масс тела. Центр масс определяется из совокупности всех блоков Body Elements, составляющих тело. Если два твердотельных блока соединяются через блок жесткого преобразования, они принадлежат одному и тому же телу. Одна гравитационная сила действует в центре масс этого тела.
Однако если блоки цилиндрического тела соединяются через блок поворотного соединения, они принадлежат к отдельным телам. Затем к отдельным центрам масс этих тел прикладываются две гравитационные силы. То же самое можно сделать, даже если заменить блок «Поворотное соединение» блоком «Сварное соединение». Независимо от его типа, каждый соединительный блок разделяет элементы тела, которые он соединяет, на отдельные тела.
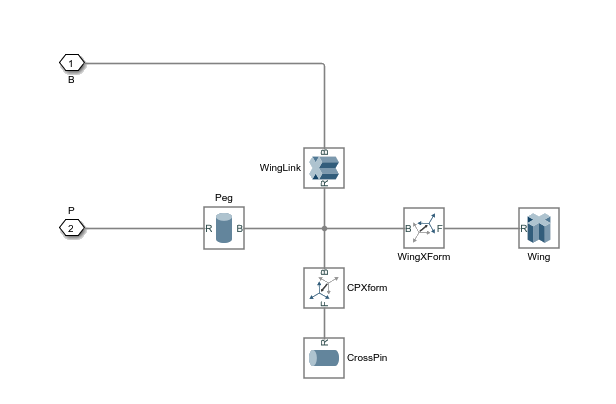
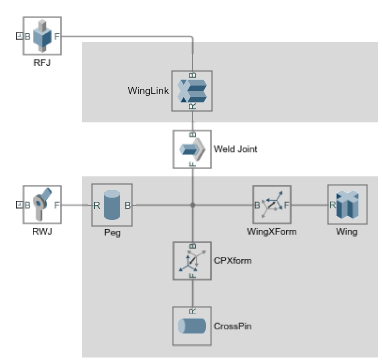
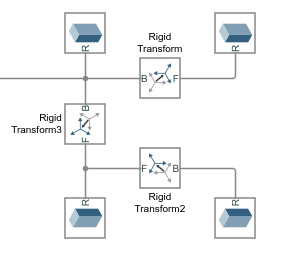
На рисунке показан эффект добавления блока сварного соединения к блочной сети, которая первоначально состояла из одного тела. Этот соединительный блок делит тело на два тела, одно из которых содержит только блок цилиндрического тела с именем WingLinkа другой содержит остальные блоки «Цилиндрическое твердое тело» и «Жесткое преобразование». Блоки Гравитационного поля (Gravitational Field) в модели, если таковые имеются, будут в этом случае оказывать силу в вычисленном центре масс каждого тела.
Блоки, которые содержат корпус, соединяются жестко и, в идеальном случае, последовательно. Результатом является древовидная структура, в которой путь между любыми двумя кадрами уникален. Технически, однако, возможно жестко соединять блоки так, чтобы они образовывали жесткую петлю, замкнутую структуру, образованную соединением открытых концов ветви или дерева.
Контур жесткого преобразования
В модели не допускаются контуры жесткого преобразования. Они содержат избыточные (и ненужные) жесткие соединения, что может привести к предотвратимым числовым ошибкам, если они будут включены в модель. Если модель содержит жесткий кинематический контур, необходимо разорвать этот контур, удалив его избыточные жесткие соединения. На рисунке показан пример.
Обычно блоки, принадлежащие телу, заключают внутри блока Simulink Subsystem. Полученный блок подсистемы можно сохранить в библиотеке Simulink для последующего использования в различных моделях. Маска блока Подсистема (Subsystem) обеспечивает место для определения переменных и параметров, которые являются общими для замкнутых блоков - часто некоторой длины, плотности и цвета - без загромождения рабочего пространства модели.
Тело можно смоделировать и преобразовать в подсистему Simulink в любое время до его использования в модели с несколькими телами. Например, при моделировании поршневого двигателя можно отложить работу над корпусом поршня до готовности соединить поршень с корпусом двигателя или шатуном. Однако, учитывая, что форма и размер одного тела часто зависят от формы и размера другого, следует, по крайней мере, учитывать эти атрибуты, прежде чем сосредоточиться на сборке.
В командной строке MATLAB введите sm_cam_flapping_wing_lib. Откроется библиотека Simulink с блоками подсистем, представляющими два тела, используемые в sm_cam_flapping_wing модель. Каждый из блоков имеет порты кадра для подключения к модели.
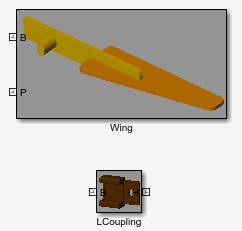
Дважды щелкните блок подсистемы с именем Peg. Откроется пользовательское диалоговое окно с ключевыми параметрами, необходимыми для полного определения этого тела. Указанные здесь значения используются в блоках «Цилиндрическое твердое тело» и «Жесткое преобразование», составляющих блок подсистемы.
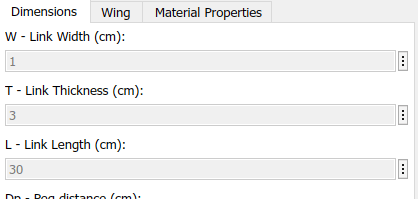
Щелкните правой кнопкой мыши блок подсистемы и выберите «Маска» > «Маска вида». Откроется редактор Simulink Mask Editor с параметрами и кодом, относящимися к корпусу крыла. Параметры и связанные с ними переменные MATLAB определяются на вкладке «Параметры и диалоговое окно». Код, используемый для создания профилей формы крыла и лонжерона, определяется на вкладке «Инициализация».
Щелкните правой кнопкой мыши блок подсистемы и выберите «Маска» > «Искать под маской». Открывается блок-схема, соответствующая этой подсистеме. Откройте диалоговые окна некоторых блоков и обратите внимание на переменные MATLAB, используемые для определения многих их параметров. Это переменные, определенные в маске подсистемы и указанные в диалоговом окне блока подсистемы.