Каркасы тел обеспечивают точки соединения для соединений и зависимостей в модели. Они также определяют относительные ориентации этих соединений и зависимости, а следовательно, направления движения, разрешенные во время моделирования. Для успешного соединения тел с помощью соединений и зависимостей необходимо создать подходящие каркасы соединений, и это задача, которую лучше всего выполнять при моделировании самих тел.
Можно добавлять рамки непосредственно к твердым телам с помощью интерфейса создания рамок твердотельных блоков. Этот интерфейс позволяет определять положение и ориентацию каркаса в интерактивном режиме с точки зрения ключевых геометрических элементов, таких как вершины, кромки и грани, или с точки зрения ключевых инерционных элементов, таких как центр масс и главные оси инерции. Создаваемые фреймы называются пользовательскими и отображаются как порты фреймов в твердотельном блоке, к которому они принадлежат. На рисунке показан блок Brick Solid с двумя пользовательскими портами рамы с метками F1 и F2.

Можно также создать рамки с помощью блока «Жесткое преобразование». Этот блок позволяет определить положение и ориентацию кадра численно с точки зрения преобразования поворота и перемещения. Можно использовать различные параметризации преобразования, включая матрицы вращения и последовательности вращения в случае преобразований вращения, а также декартовы и цилиндрические координаты смещения в случае преобразований перемещения. На рисунке показан новый кадр (F), созданный с помощью блока «Жесткое преобразование» из существующего твердого кадра.
![]()
Рамки, создаваемые с помощью блоков жесткого преобразования, не зависят от каких-либо конкретных твердотельных элементов. Их можно разместить в любом месте относительно другого кадра, если только можно определить преобразование, необходимое для получения этого размещения. При размещении блока «Жесткое преобразование» между двумя портами фрейма можно более точно представить блок как средство смещения уже существующих фреймов. На рисунке показано смещение, заданное блоком «Жесткое преобразование», размещенным между двумя существующими кадрами.
![]()
Дополнительные сведения о кадрах и преобразованиях см. в разделе Работа с кадрами.
В командной строке MATLAB введите sm_cam_flapping_wing. Открывается модель хлопающего механизма крыла. Загляните внутрь маски подсистемы тела с именем RightWing. Обратите внимание, что два твердотельных блока, Peg и WingLink, каждый имеет два порта полки. Один из портов идентифицирует пользовательский каркас, созданный с помощью блока цилиндрического тела. Ознакомьтесь с одним из пользовательских фреймов:
Открытие диалогового окна блока «Цилиндрическое тело» с именем Peg.
На панели инструментов визуализации нажмите кнопку «Рамка». Панель визуализации обновляется для отображения опорных и пользовательских рамок твердого тела.
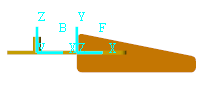
В разделе «Свойства» диалогового окна разверните узел «Рамки» и нажмите кнопку «Редактировать». Откроется интерфейс создания фрейма с текущим определением фрейма:
Начало координат рамы размещено в центре нижней поверхности цилиндра.
Оси рамы были выровнены с осями локальной опорной рамы.
Имя кадра соответствует метке соответствующего порта кадра (B).
Обратите внимание, что линии соединения между некоторыми твердотельными блоками содержат блоки жесткого преобразования с именем CPXform и WingXForm. Эти блоки определяют угловые и поступательные смещения между соединяемыми ими сплошными кадрами. Изучите преобразования, указанные в одном из блоков:
Открытие диалогового окна блока «Жесткое преобразование» с именем WingXForm. Следует отметить, что преобразование поворота задается путем выравнивания двух осей рамы толкателя относительно двух осей базовой рамы.
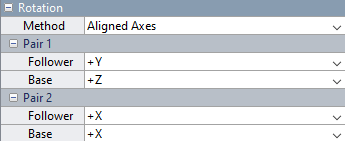
Разверните раздел Параметры перемещения (Translation parameters). Обратите внимание, что поступательное смещение задается вдоль оси (базовой рамы). Поступательное смещение параметризуется в терминах переменной MATLAB, Ow, значение которого указано в WingLink блок подсистемы.
![]()
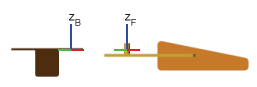
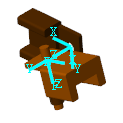
Обновите блок-схему. Откроется Mechanics Explorer со статической визуализацией модели лопнувшего крыла. На панели древовидного представления разверните узел RightWing и нажмите кнопку WingXForm для выделения кадров, принадлежащих блоку «Жесткое преобразование».
При определении его размещения на теле необходимо учитывать цель каркаса соединения - конкретное соединение или ограничение. Соединения и зависимости часто накладывают особые требования к сборке на соединяемые ими рамы. Эти требования влияют на правильное размещение соединительной рамы. Их можно найти на странице ссылок блока соединения или зависимости.
Если цель является соединением, обратите внимание на ее степени свободы - типы движения, допускаемые между рамами соединения соединения, - и на оси каркаса, которым они соответствуют. Например, блок поворотного соединения обеспечивает одну степень свободы вращения относительно общей оси Z соединительных рам на основании и ведомых телах.
Чтобы соединить два тела с помощью блока «Соединение вращения» (Revolute Joint), необходимо разместить их соединительные рамы так, чтобы оси Z каждого из них были выровнены с требуемой осью вращения на соответствующем теле. На рисунке показан пример: Housing и RightWing органов sm_cam_flapping_wing модель с соединительными рамами, правильно размещенными для блока поворотного соединения.
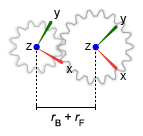
Если целью соединительной рамы является ограничение, например, характеристика зубчатых колес в сетке, обратите внимание на размещения соединительной рамы, необходимые для сборки. Например, блок «Ограничение общей передачи» требует, чтобы рамки соединения на основании и ведомых телах были разнесены на расстояние, равное сумме их радиусов шага, если для типа сетки задано значение External. Это также требует, чтобы z-оси были параллельными, и что x - и y-оси одной являются копланарными с осями другой.
Требования к сборке блоков зависимостей определяют, каким образом остальная часть модели должна удерживать рамки соединения, частично через определения тел и частично через другие соединения и зависимости, чтобы ограничение применялось без ошибок. Сведения о размещении соединительных рам на телах зубчатых колес для сборки с помощью блоков зависимостей зубчатых колес см. в разделе Сборка модели зубчатых колес.
Модели с замкнутым контуром, такие как четырехпалубные и кривошипно-ползунковые механизмы, ограничены в положениях и ориентациях, которые могут принимать их составные тела. Если при размещении рамки соединения соединение или ограничение становятся несовместимыми с любым другим контуром, то есть если для успешного соединения требуется другой разрыв, сборка завершается неудачей.
Это имеет место в плоском четырехпалубном механизме, например, когда расстояние между соединительными рамами на каком-либо одном звене превышает сумму эквивалентных расстояний в остальных звеньях, или когда ориентации соединительных каркасов вынуждают оси вращения соединений к параллельному выравниванию.
Можно предотвратить множество ошибок сборки, тщательно определив рамки соединения на теле с учетом будущих соединений. Рассмотрим требования к сборке, специфичные для соединения или блока зависимостей, а также кинематические зависимости, накладываемые остальной частью модели. В общем случае при сбое сборки необходимо выполнить следующие действия.
Определите несборное соединение или зависимость. Используйте отчет Simscape Multibody Model Report (Сервис > Отчет о модели в строке меню Проводника Mechanics).
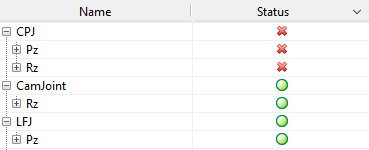
Проверьте соответствующие полки соединений. Используйте Mechanics Explorer для визуализации этих кадров. Щелкните имя несборного соединения или ограничения на панели древовидного представления, чтобы выделить его кадры на панели визуализации. Сравните размещение этих рам с требованиями сборки соединения или зависимости.
Преобразуйте рамки соединения в соответствии с требованиями сборки соединений или зависимостей. Блок «Жесткое преобразование» можно использовать для применения требуемых преобразований поворота и перемещения. Если рамка соединения является пользовательской рамкой, принадлежащей твердотельному блоку, можно использовать этот блок для редактирования определения рамки.
Пример устранения сбоя сборки, вызванного неправильным размещением рамки соединения, см. в разделе Устранение ошибок сборки.
