Однофазная индукционная машина прямого регулирования крутящего момента
Simscape / Электрический / Контроль / Машинный Контроль за Индукцией
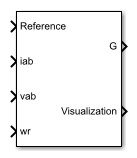
Блок управления прямым крутящим моментом индукционной машины (однофазный) реализует структуру управления прямым крутящим моментом однофазной индукционной машины.
На этой диаграмме показана архитектура прямого управления крутящим моментом для однофазных машин
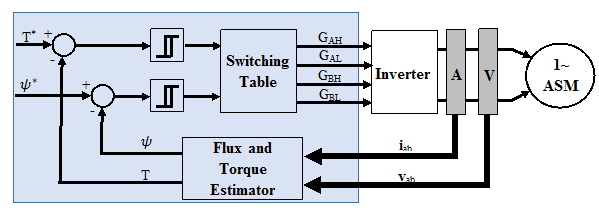
Оценка крутящего момента и потока основана на уравнениях напряжения машины. Уравнения дискретного временного напряжения, использующие метод обратной дискретизации Эйлера, являются:
Цз − 1
Цз − 1
где:
Ras и Rb - сопротивление основной обмотки и сопротивление вспомогательной обмотки соответственно.
ia и ib - ток основной обмотки и ток вспомогательной обмотки соответственно.
va и vb - напряжение основной и вспомогательной обмоток соответственно.
в качестве основного и вспомогательного потоков обмоток, соответственно.
Крутящий момент и поток получаются из:
1aü bia)
λ b2
где:
p - количество пар полюсов.
a - отношение поворота вспомогательных обмоток к основным обмоткам.
Использование простых гистерезисных компараторов определяет состояние ошибок потока и крутящего момента. Следующие чертежи иллюстрируют компараторы гистерезиса и сектора переключения.


В таблице показана оптимальная таблица коммутации (верхняя сторона инвертора).
| cstart, cT, S (start) | S0 | S1 | S2 | S3 | |
|---|---|---|---|---|---|
cψ = 1 | cT = 1 | 1, 1 | 0, 1 | 0, 0 | 1, 0 |
cT = 0 | 1, 0 | 1, 1 | 0, 1 | 0, 0 | |
cψ = 0 | cT = 1 | 0, 1 | 0, 0 | 1, 0 | 1, 1 |
cT = 0 | 0, 0 | 1, 0 | 1, 1 | 0, 1 | |
Эталон крутящего момента может быть предоставлен в качестве входного сигнала или, в случае управления скоростью, может быть сгенерирован внутри с использованием PI контроллера скорости.
Привязка потока генерируется внутри с помощью:
2.dfnp)
где,
startr - угловая механическая скорость ротора в рад/с.
fn - номинальная частота.
λ n - номинальный поток.
Время покоя инвертора мощности в этом блоке не учитывается. Для реализации аппаратных средств добавьте нерабочее время внешне.
[1] Такахаси, И. и Т. Ногути. «Новая стратегия быстрого реагирования и высокоэффективного управления асинхронным двигателем». Транзакции IEEE для отраслевых приложений. т. IA-22, номер 5, 1986, стр. 820 - 827.
