Поблочное дискретно-временное однофазное управление индукционной машиной с ориентацией на поле
Simscape / Электрический / Контроль / Машинный Контроль за Индукцией
Блок управления, ориентированный на поле индукционной машины (однофазный), реализует однофазную управляющую структуру, ориентированную на поле индукционной машины.
Ориентированная на поле архитектура управления для однофазной индукционной машины:
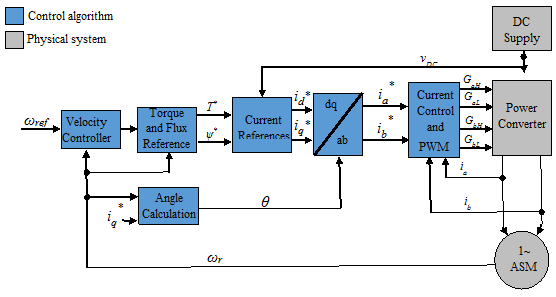
Можно указать эталон крутящего момента в качестве входного значения или, в случае управления скоростью, создать эталон внутри с помощью контроллера скорости PI. Эталон крутящего момента, полученный из контроллера частоты вращения PI, представляет собой:
− startr)
где startr - угловая механическая скорость ротора в рад/с.
Блок генерирует привязку потока как
2.dfnp)
где:
p - число пар полюсов.
fn - номинальная частота.
λ n - номинальный поток.
Текущие ссылки получены из параметров машины:
paLmsstart*
a2Lms
где:
Lms - это взаимная индуктивность основной обмотки.
Llar - индуктивность утечки ротора основной обмотки.
а - отношение числа витков вспомогательных обмоток к числу основных обмоток.
Угол вычисляется решением:
+ Llar)
Преобразование в стационарную опорную рамку выполняется с использованием:
(start)) (идик)
Управляющая структура реализована в одной частоте дискретизации.
[1] Корреа, М. Б. Р., Якобина, С. Б., Лима, А. М. Н., Да Сильва, Э. Р. С. «Полевое ориентированное управление однофазным приводом индукционного двигателя». PESC 98 Запись. 29-я ежегодная конференция IEEE Power Electronics Specials. Том 2, 1998, стр. 990 - 996.
