Блок дискретно-временной индукционной машины ВОК
Simscape / Электрический / Контроль / Машинный Контроль за Индукцией
Блок полеориентированного контроллера индукционной машины реализует структуру полеориентированного управления индукционной машиной (ВОК) с использованием системы на единицу измерения. Для разъединения крутящего момента и потока ВОК использует опорную рамку ротора d-q. На рисунке показана структура управления.
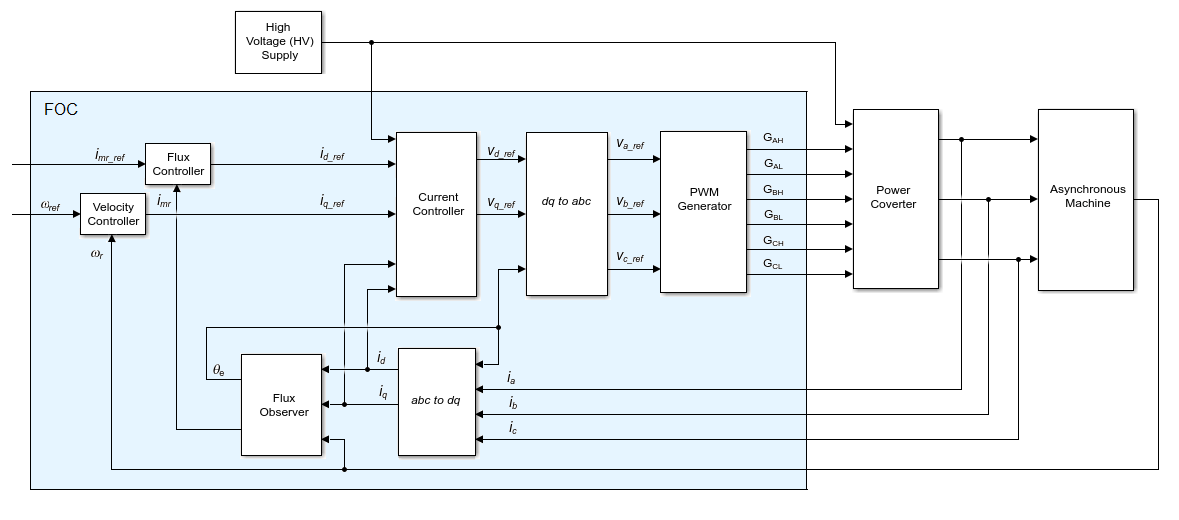
На схеме:
startr - измеренная угловая скорость.
startref - опорная угловая скорость.
id и iq - токи статора по осям d- и q.
ia, ib и ic - токи обмоток статора в a-, b- и c-фазе.
imr_ref - опорный намагничивающий ток.
imr - намагничивающий ток.
vd и vq - напряжения статора по осям d- и q.
va, vb и vc - напряжения обмоток статора в a-, b- и c-фазе.
starte - электрический угол ротора.
GAH, GAL, GBH, GBL, GCH и GCL являются импульсами a-, b- и c-фазы высокого (H) и низкого (L) уровня.
Параметры машины известны.
В реализации используется система на единицу измерения.
Реализация структуры управления использует одну частоту выборки.

