Линейный синхронный двигатель постоянного магнита с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
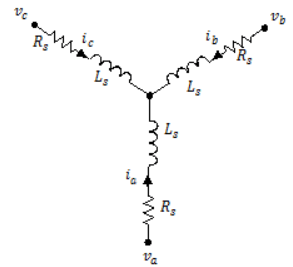
Блок PMLSM моделирует линейный синхронный двигатель постоянного магнита с трехфазным статором с намоткой. На рисунке показана эквивалентная электрическая цепь для обмоток статора.
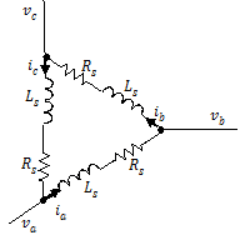
Можно также моделировать линейный синхронный двигатель с постоянным магнитом в конфигурации с дельта-намоткой, установив для параметра Тип обмотки значение Delta-wound.
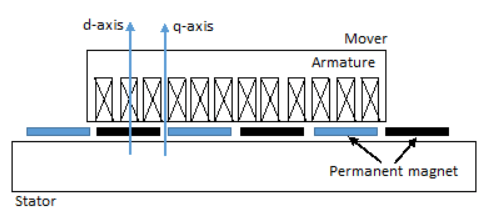
На этом рисунке показана конструкция двигателя.
Напряжения на обмотках статора определяются:
d
где:
va, vb и vc - индивидуальные фазные напряжения на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие в обмотках статора.
В качестве скорости изменения магнитного потока в каждой обмотке статора используются d
Постоянный магнит и три обмотки вносят вклад в общий поток, связывающий каждую обмотку. Общий поток определяется следующим образом:
[
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимными индуктивами обмоток статора.
В качестве потоков постоянного магнита, связывающих обмотки статора, используются, в частности, потоки постоянного магнита.
Индуктивности в обмотках статора являются функциями электрического угла и определяются:
смещение ротора,
2starte),
2δ/3)),
(
(
(
и
(
где:
starte - электрический угол.
смещение ротора - 0 если вы определяете электрический угол ротора относительно оси d, или -pi/2 при определении электрического угла ротора относительно оси q.
и τ - полярная подача.
x - расстояние.
Ls - однофазная самоиндукция статора. Это значение представляет собой среднюю самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является флуктуацией собственной индуктивности и взаимной индуктивности с изменяющимся углом.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Поток постоянного магнита, связывающий обмотку а, является максимальным, когда (e) = 0 °, и нулевым, когда (e) = 90 °. Поэтому связанный поток двигателя определяется следующим образом:
[((
где groupm - связь постоянного магнитного потока.
При применении преобразования Парка к электрическим уравнениям создается выражение силы, не зависящее от угла.
Трансформация парка определяется:
0.50.50.5]
где starte - электрический угол, определяемый как Npx.
С помощью преобразования Парка на обмотке статора напряжения и токи преобразуют их в кадр dq0, который не зависит от угла:
vavbvc]
и
iaibic].
При применении преобразования Парка к первым двум электрическим уравнениям формируются следующие уравнения, определяющие поведение блока:
NpviqLq,
idLd + λ m),
и
idiqLq),
− Бмв,
где:
Ld = Ls + Ms + 3/2 Lm. Ld - индуктивность d-оси статора.
Lq = Ls + Ms − 3/2 Lm. Lq - индуктивность по оси q статора.
L0 = Ls - 2Ms. L0 - индуктивность нулевой последовательности статора.
Rs - сопротивление статора на фазу.
v - линейная скорость.
Np - коэффициент полярного шага.
M - масса движителя.
Bm - демпфирование.
FL - сила нагрузки.
Блок PMLSM использует исходную неоргональную реализацию преобразования Park. При попытке применить альтернативную реализацию получаются разные результаты для напряжения и токов dq0.
Соотношение между постоянной силы kf, постоянной обратной силы ke и связью постоянного магнитного потока определяется следующим образом:
Npstartm.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
[3] X. Zhang и J. Pan. Нелинейное надежное управление режимом скольжения для линейных синхронных двигателей PM. 2006 CES/IEEE 5-я Международная конференция по электронике и управлению движением, Шанхай, 2006, стр. 1-5.

