Шестифазный синхронный двигатель постоянного магнита с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
Блок PMSM (шестифазный) моделирует синхронную машину с постоянным магнитом (PMSM) со статором с шестифазной звездой.
Шестифазная PMSM имеет две группы трехфазных обмоток статора: группу ABC и группу XYZ. Эти две группы имеют сдвиг фазы на 30 градусов.
На рисунке показана эквивалентная электрическая цепь для обмоток статора.
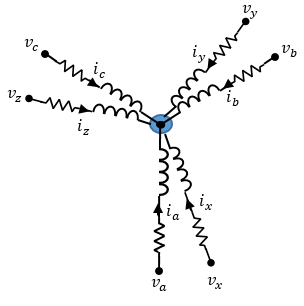
Напряжения на обмотках статора определяются:
где:
va, vb и vc - отдельные фазные напряжения от порта _ ABC к нейтральному порту n1.
vx, vy и vz - отдельные фазные напряжения от порта ~ XYZ до нейтрального порта n2.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие от порта _ ABC к порту n1.
ix, iy и iz - токи, протекающие от порта _ XYZ к порту n2.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и шесть обмоток вносят вклад в общий поток, связывающий каждую обмотку. Общий поток определяется следующим образом:
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb, Lcc, Lxx, Lyy и Lzz являются самоиндукциями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивами обмоток статора.
В качестве потоков постоянных магнитов, связывающих обмотки статора, используются, по меньшей мере, λ am, λ bm, (по меньшей мере,
Индуктивности в обмотках статора являются функциями электрического угла ротора, определяемого:
смещение ротора
Lcy=Lyc=Lmcos (2 (θe−π12)) Lcz=Lzc=3Ms+Lmcos (2 (θe−5π12))
где:
startr - механический угол ротора.
starte - электрический угол ротора.
смещение ротора - 0 если вы определяете электрический угол ротора относительно оси d, или -pi/2 при определении электрического угла ротора относительно оси q.
Ls - однофазная самоиндукция статора. Это значение является средней собственной индуктивностью каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является флуктуацией собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Поток постоянного магнита, связывающий обмотку a-a ', находится на максимуме, когда (е) = 0 °, и нуле, когда (е) = 90 °. Поэтому связанный поток двигателя определяется следующим образом:
),
где groupm - связь постоянного магнитного потока.
Применение развязанного преобразования к блочным электрическим уравнениям создает выражение для крутящего момента, которое не зависит от угла ротора.
Разъединенное преобразование определяется следующим образом:
1−12−12−323200−32321212−1111000000111].
Матрица преобразования, P, имеет это псевдо-ортогональное свойство:
(starte).
С помощью развязанного преобразования на обмотке статора напряжения и токи преобразуют их в кадр dq0, который не зависит от угла ротора.
Чтобы получить напряжения статора d-оси, q-оси и нулевой последовательности и связи потока для групп ABC и XYZ, примените преобразование к уравнениям связи напряжения и потока:
где:
vd, vq, vz1, vz2, v01 и v02 - компоненты d, q, z1 и z2 и напряжения статора нулевой последовательности для групп ABC и XYZ, определяемые:
vavbvcvxvyvz].
id, iq, iz1, iz2, i01 и i02 - токи статоров d-оси, q-оси и нулевой последовательности для групп ABC и XYZ, определяемые:
iaibicixiyiiz].
+ 3Lm - индуктивность d-оси статора.
− 3Lm - индуктивность оси q статора.
2Ms - индуктивность нулевой последовательности статора.
λ - механическая частота вращения ротора.
N - число пар полюсов постоянных магнитов ротора.
Уравнение крутящего момента определяется следующим образом:
idiqLq].
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Краузе, Пол, Олег Васынчук, Скотт Судхофф и Стивен Пекарек, eds. Анализ электрических машин и приводных систем. Хобокен, Нью-Джерси, США: John Wiley & Sons, Inc., 2013. https://doi.org/10.1002/9781118524336.
[2] Су, Цзянь Ен, Цзинь Бо Ян и Ги Цзе Ян. Исследование векторного контроля и техники ШИМ шестифазного PMSM. Advanced Materials Research 516-517 (май 2012): 1626-31. https://doi.org/10.4028/www.scientific.net/AMR.516-517.1626.


