Синхронная машина дискретного или непрерывного времени AC7C система возбуждения, включающая автоматический регулятор напряжения и возбудитель
Управление Simscape/Electrical/Control/SM
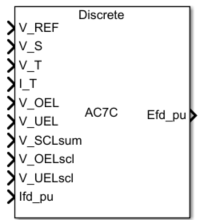
Блок SM AC7C реализует синхронный тип машины AC7C модель системы возбуждения в соответствии с IEEE 421,5-2016 [1].
Используйте этот блок для моделирования управления и регулирования напряжения поля синхронной машины, которая работает как генератор с помощью вращающегося возбудителя переменного тока.
Можно переключаться между непрерывной и дискретной реализациями блока, используя параметр Sample time (-1 для унаследованного). Чтобы настроить интегратор на непрерывное время, установите для свойства Sample time (-1 для унаследованного) значение 0. Чтобы настроить интегратор на дискретное время, установите для свойства Sample time (-1 для унаследованного) положительное, ненулевое значение или значение -1 для наследования времени выборки из восходящего блока.
Блок SM AC7C состоит из пяти основных компонентов:
Компенсатор тока изменяет измеренное напряжение на клемме в зависимости от тока клеммы.
Измерительный преобразователь напряжения моделирует динамику контактного преобразователя напряжения с помощью фильтра нижних частот.
Компонент «Элементы управления возбуждением» сравнивает выходной сигнал преобразователя напряжения с опорным напряжением клеммы для получения ошибки напряжения. Эта ошибка напряжения затем проходит через регулятор напряжения для создания напряжения возбуждения возбудителя.
Вращающийся возбудитель переменного тока моделирует вращающийся возбудитель переменного тока, который создает напряжение поля, которое подается на управляемую синхронную машину. Блок также подает ток поля возбудителя (который имеет стандартный символ VFE) обратно в систему возбуждения.
Источник питания и автоматическое возбуждение моделируют источник питания для управляемого выпрямителя, когда он не зависит от напряжения на клемме. Это также позволяет представить самовозространение для возбудителя.
На этой диаграмме показана общая структура модели системы возбуждения AC7C:
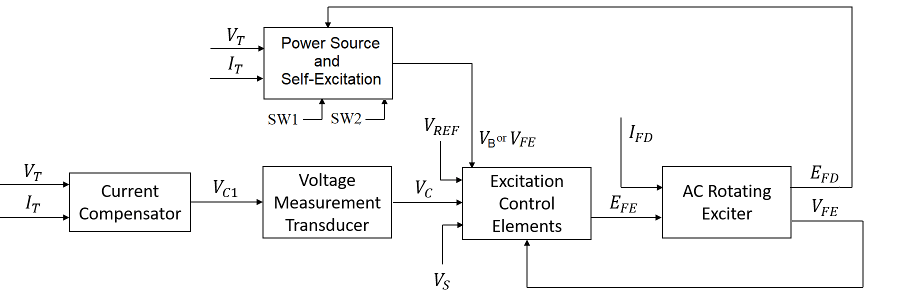
На схеме:
VT и IT - измеренное напряжение на клеммах и ток синхронной машины.
VC1 - напряжение на клемме с компенсацией тока.
VC - отфильтрованное напряжение на клемме с компенсацией тока.
VREF - опорное напряжение на клемме.
VS - напряжение стабилизатора системы питания.
SW1 и SW2 являются выбранными пользователем переключателями источника питания для управляемого выпрямителя.
VB - напряжение возбуждения возбудителя.
EFE и VFE - напряжение возбуждения возбудителя и ток соответственно.
EFD и IFD - напряжение поля и ток соответственно.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
+ XC2,
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Измерительный преобразователь напряжения выполнен в виде блока фильтра нижних частот с постоянной времени TR. Для получения информации о дискретных и непрерывных реализациях см. документацию по этому блоку.
Эта диаграмма иллюстрирует общую структуру элементов управления возбуждением:
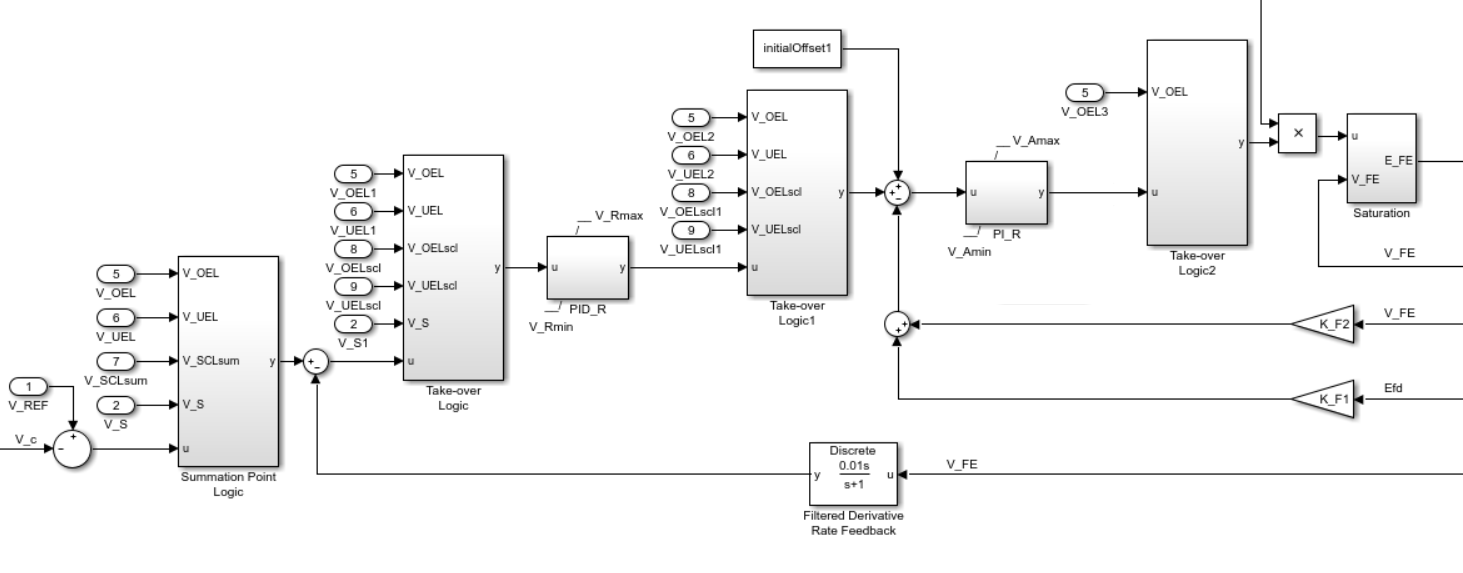
На схеме:
Подсистема логики точки суммирования моделирует входное местоположение точки суммирования для ограничителя чрезмерного возбуждения (OEL), ограничителя недостаточного возбуждения (UEL), ограничителя тока статора (SCL) и напряжения переключателя питания (V_S). Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Существует три подсистемы Take-over Logic. Они моделируют места ввода точек приема для напряжений OEL, UEL, SCL и PSS. Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Подсистема PID_R моделирует PID-контроллер, который функционирует как управляющая структура для автоматического регулятора напряжения. Минимальными и максимальными пределами насыщения от навивки для блока являются VRmin и VRmax соответственно.
Подсистема PI_R моделирует PI-контроллер, который функционирует как структура управления для регулятора тока поля. Минимальными и максимальными пределами насыщения от навивки для блока являются VAmin и VAmax соответственно.
При самовозбудении с ненулевым KR и селектором источника питания SW2 параметр установлен в Position B: do not use variable V_Bмощность регулятора напряжения получают из выходного напряжения возбудителя. Сигнал команды регулятора напряжения умножается на выходное напряжение возбудителя, EFD, умноженное на KR. Дополнительные сведения о выбранных пользователем логических коммутаторах для источника питания управляемого выпрямителя см. в разделах Источник питания и самовосприятие.
KF1 и KF2 моделируют внутренний контур регулятора с высокой пропускной способностью, который регулирует поле генератора или ток возбуждения.
Блок отфильтрованной производной моделирует траекторию обратной связи скорости для стабилизации системы возбуждения, если автоматический регулятор напряжения не имеет члена производной. Здесь KF3 и TF являются константами усиления и времени этой системы соответственно. Для получения информации о дискретных и непрерывных реализациях см. документацию по блоку отфильтрованных производных.
-K_L*VFE и inf - минимальные и максимальные пределы насыщения для выходного напряжения поля возбудителя EFE.
Для изменения выходного сигнала регулятора напряжения в небезопасных рабочих условиях можно использовать различные ограничители тока поля:
Для предотвращения перегрева обмотки поля из-за чрезмерной потребности в токе поля используйте ограничитель перегрузки.
Используйте ограничитель неполучения, чтобы увеличить возбуждение поля, когда оно слишком низкое, что создает риск десинхронизации.
Используйте ограничитель тока статора для предотвращения перегрева обмоток статора из-за избыточного тока.
Присоедините выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования в составе контура обратной связи автоматического регулятора напряжения (АВР)
Точка захвата для переопределения обычного поведения AVR
При использовании ограничителя тока статора в точке суммирования используйте одиночный вход VSCLsum. При использовании ограничителя тока статора в точке захвата используйте как вход сверхвыпуска, VOELscl, так и вход недозволения, VТТscl.
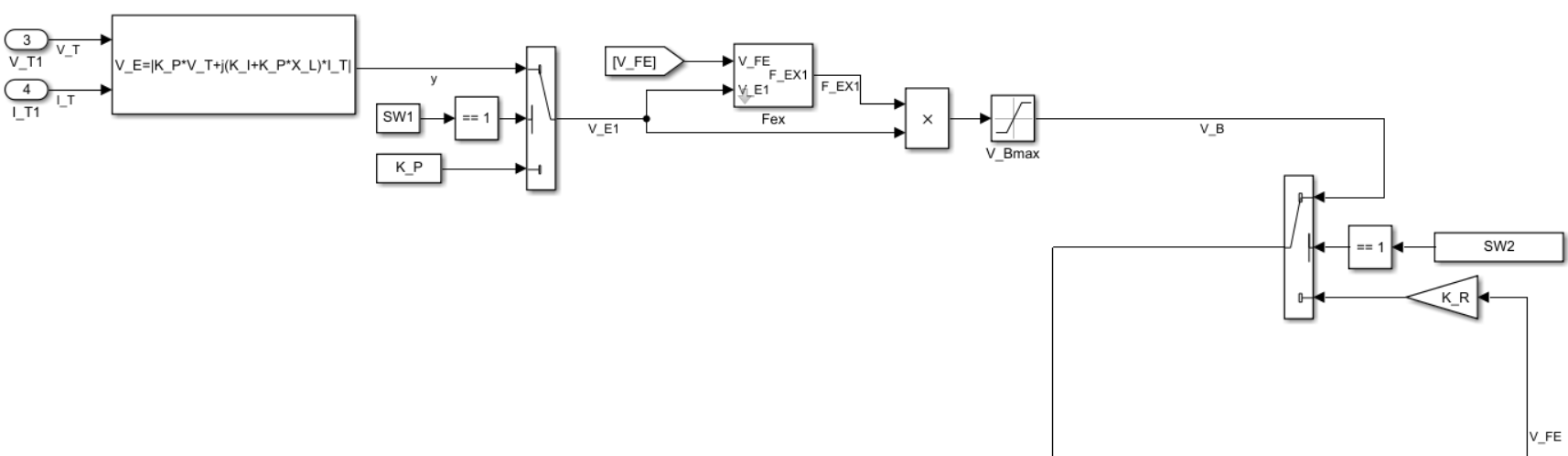
Эта диаграмма иллюстрирует общую структуру вращающегося возбудителя переменного тока:
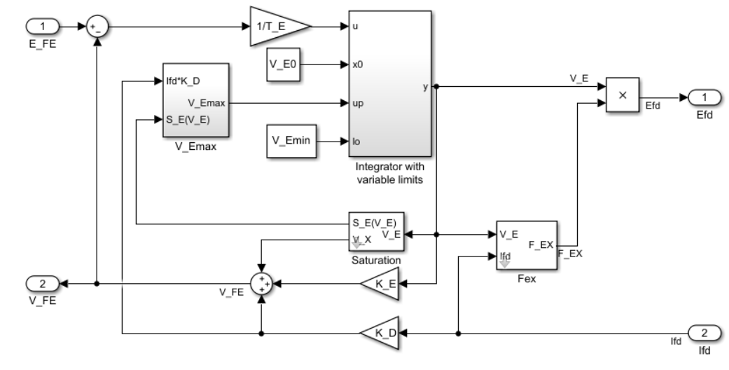
На схеме:
Ток поля возбудителя VFE моделируется как суммирование трех сигналов:
Нелинейная функция Vx моделирует насыщение выходного напряжения возбудителя.
Пропорциональный член KE моделирует линейную зависимость между выходным напряжением возбудителя и током поля возбудителя.
Эффект размагничивания тока нагрузки на выходное напряжение возбудителя моделируется с использованием постоянной размагничивания KD в контуре обратной связи.
Интегратор с подсистемой переменных предельных значений интегрирует разность между EFE и VFE для формирования выходного напряжения VE возбудителя переменного тока. TE - постоянная времени для этого процесса.
Нелинейная функция FEX моделирует падение выходного напряжения возбудителя от регулирования выпрямителя. Эта функция зависит от постоянной KC, которая сама является функцией коммутационного реактивного сопротивления.
Параметры VEmin и VFEmax моделируют нижний и верхний пределы вращающегося возбудителя.
Для управляемого выпрямителя можно использовать различные представления источника питания, выбрав соответствующую опцию в параметре SW1 селектора источника питания. Источник питания для управляемого выпрямителя может быть либо получен из напряжения на клемме (Position A: power source derived from terminal voltage) или он может быть независимым от напряжения на клемме (Position B: power source independent from the terminal conditions). Обратите внимание, что этот коммутатор зависит от состояния второго логического коммутатора.
Второй логический переключатель, селектор источника питания SW2, определяет, использует ли возбудитель самовосприятие или нет. Возбудитель возбуждается самостоятельно, если параметр селектора источника питания SW2 установлен в Position B: do not use variable V_B, поскольку параметры модели, связанные с переменной VB, не влияют на моделирование.
[1] Рекомендуемая практика IEEE для моделей систем возбуждения для исследований устойчивости энергосистемы. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
