При использовании Simulink ® с ROS можно публиковать или подписываться на разделы в сети ROS. В диалоговых окнах блоков Публикация (Publish) и Подписка (Subscribe) можно выбрать из списка тем в сети ROS. Для получения списка тем необходимо подключение к сети ROS. Выбрать раздел можно с помощью следующих действий.
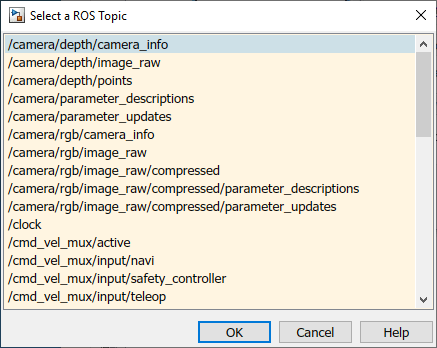
В этом диалоговом окне отображается список тем, доступных в шаблоне ROS. Выбор темы из списка автоматически заполняет параметры «Тема» и «Тип сообщения» для соответствующего диалогового окна маски блока. Если тип сообщения не поддерживается в MATLAB ® ROS, Simulink выдаст ошибку. После выбора раздела он сохраняется вместе с блоком. Даже если раздел больше не доступен в сети, блок будет использовать это имя раздела.
Чтобы обновить список, закройте и снова откройте диалоговое окно.
Чтобы использовать раздел, не размещенный в сети ROS, или если вы не подключены в данный момент, используйте параметр «Указать свой» в параметре «Источник раздела» в диалоговом окне маски блока.
Simulink ROS позволяет выбирать из списка типы сообщений, в настоящее время поддерживаемые MATLAB ROS, при установке типа сообщения для блоков Публикация, Подписка или Пустое сообщение.
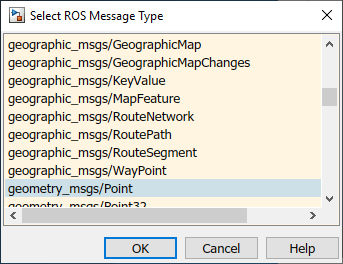
Это список всех типов сообщений, поддерживаемых в MATLAB ROS, включая любые пользовательские типы сообщений. Можно начать ввод имени требуемого типа сообщения или вручную выполнить поиск в списке.
Выбранный тип сообщения сохраняется вместе с блоком и сохраняется вместе с моделью.
Примечание.При использовании генерации кода информация о типе сообщения не включается. Необходимо убедиться, что в среде Linux ROS установлены пакеты ROS, содержащие необходимые определения типов сообщений.
При использовании блоков Get Parameter (Получить параметр) и Set Parameter (Задать параметр) имеется опция «Select from ROS Network» (Выбрать из сети ROS) в параметрах блока, которая получает список параметров, находящихся в данный момент на сервере. При нажатии кнопки «Выбрать» появится это диалоговое окно.
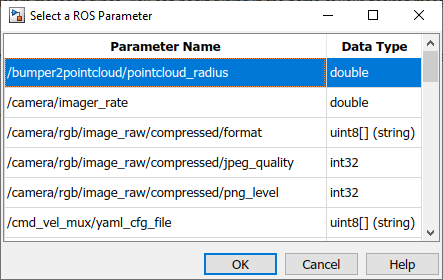
Это список параметров, которые можно выбрать на сервере параметров ROS. Параметры, выделенные серым цветом, имеют неподдерживаемые типы данных. Выберите имя параметра, которое не отображается серым цветом, и нажмите кнопку «ОК». Это должно привести к автоматическому заполнению параметров блока типами «Имя» и «Данные».
Пустое сообщение | Получить параметр | Издать | Задать параметр | Подписаться
