Вы можете импортировать в виртуальный мир в окружающей среде робота и робота Simulink® 3D Animation™ 3D модели, которые определены, используя объединенный формат описания робота (.urdf) или формат описания моделирования (.sdf). Формат файла URDF - это формат XML, определяющий различные свойства модели (обычно робота). При импорте из файла URDF импортируется только визуальное представление модели. Это представление обычно относится к файлам форм компонентов модели, определенным как файлы STL или DAE. Можно импортировать визуальные свойства объектов, присутствующих в файлах URDF или SDF, в соответствующую иерархическую структуру Transform узлы, содержащие IndexedFaceSet объекты с текстурами.
Файлы URDF и SDF используют форматы Collada DAE и STL для определения визуальных свойств объектов сцены.
Импортировать визуальное представление роботов, в 3D Мировом Редакторе, избранные Узлы> Импорт От. Затем выберите STL File, Physical Modeling XML File, URDF File, SDF File или COLLADA File. В командной строке MATLAB ® можно использовать vrimport.urdf, .dae, .stl, и .sdf файлы в виртуальный мир.
Импорт URDF и SDF поддерживает подмножество форматов файлов 3D дисковой полки Collada (объекты, которые обычно присутствуют в файлах URDF и SDF: объекты геометрической формы с текстурами).
В этом примере импортируется файл дисковой полки Collada, fox.daeв сцену с предопределенной сеткой, серым фоном и точкой обзора. Голова лисы представляет собой сферу с радиусом 1 м, размещённую в начале координат и смотрящую в направлении VRML + z-оси.
fox.dae поставляется с программным обеспечением Simulink 3D Animation. Путь: matlabroot/toolbox/sl3d/sl3ddemos/fox.dae.
В окне «MATLAB Toolstrip» на вкладке «Apps» в разделе «Simulation Graphics and Reporting» выберите «3D World Editor».
В 3D Мировом Редакторе выберите Файл> Новый от Шаблона.
В диалоговом окне файла выберите Grids и затем выберите XZGrid.wrl файл виртуального мира.
Сохранить виртуальный мир в текущей папке. Выберите Файл > Сохранить как и назовите файл виртуального мира fox_dae.wrl.
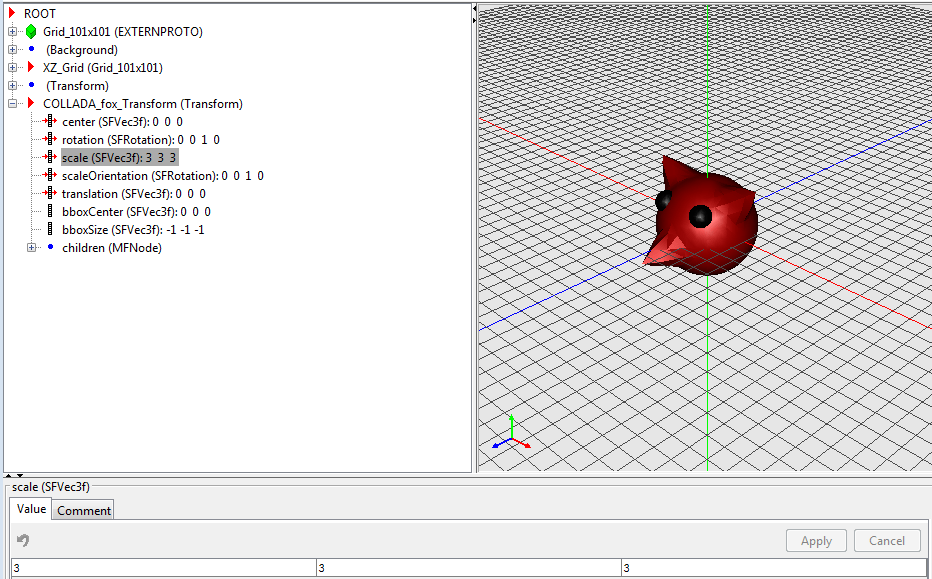
Импортируйте модель дисковой полки. Выберите «Узлы» > «Импорт из» > «Файл COLLADA». Выберите fox.dae файл.
Откройте окно COLLADA_fox_Transform узел и установите scale до 3 для каждого измерения.
В этом примере fox.urdf файл ссылается на fox.dae файл. Файл URDF преобразует исходную модель дисковой полки таким образом, что фокс перемещается в положение [4 1 0] и поворачивается так, чтобы он указывал на направление оси VRML + x.
fox.urdf поставляется с программным обеспечением Simulink 3D Animation. Путь: matlabroot/toolbox/sl3d/sl3ddemos/fox.urdf.
В окне «MATLAB Toolstrip» на вкладке «Apps» в разделе «Simulation Graphics and Reporting» выберите «3D World Editor».
В 3D Мировом Редакторе выберите Файл> Новый от Шаблона.
В диалоговом окне файла выберите Grids и затем выберите XZGrid.wrl файл виртуального мира.
Сохранить виртуальный мир в текущей папке. Выберите Файл > Сохранить как и назовите файл виртуального мира fox_urdf.wrl.
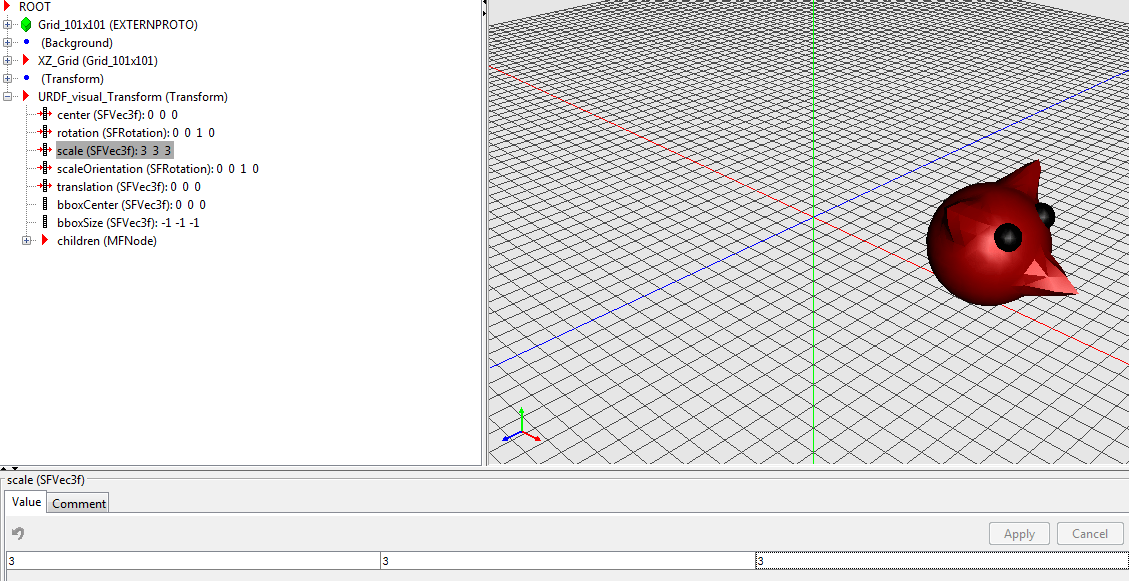
Импортируйте модель URDF. Выберите «Узлы» > «Импорт из» > «Файл URDF». Выберите fox.urdf файл.
Откройте окно URDF_visual_Transform узел и установите scale до 3 для каждого измерения.
SDF - формат XML, описывающий объекты и среды для роботов-симуляторов, визуализации и управления, изначально разработанный как часть робота-симулятора Gazebo. Папка, в которой находится model.sdf файл находится определяет имя модели SDF. В этом примере показано, как импортировать простой механизм звеньев рук.
В примере предполагается, что у вас есть
Загрузить simple_arm папка модели (включая все ее содержимое) с этого узла бизнес-моделей «Беседка»: http://models.gazebosim.org/simple_arm/. Чтобы загрузить все содержимое папки, загрузите и распакуйте model.tar.gz файл.
В окне «MATLAB Toolstrip» на вкладке «Apps» в разделе «Simulation Graphics and Reporting» выберите «3D World Editor».
В 3D Мировом Редакторе выберите Файл> Новый от Шаблона.
В диалоговом окне файла выберите Grids и затем выберите XZGrid.wrl файл виртуального мира.
Сохранить виртуальный мир в текущей папке. Выберите Файл > Сохранить как и назовите файл виртуального мира simple_arm.wrl.
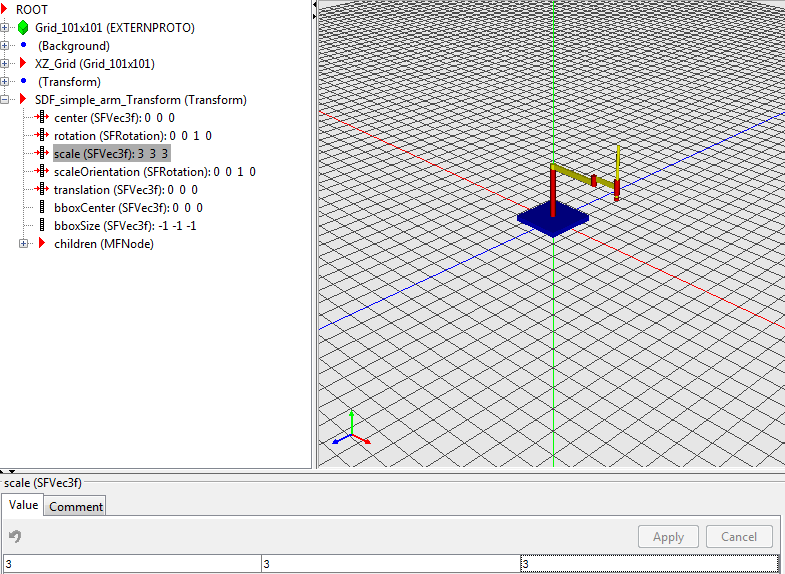
Импортируйте модель SDF. Выберите «Узлы» > «Импорт из» > «Файл SDF». В simple_arm выберите папку, model.sdf файл.
Откройте окно SDF_simple_arm_Transform узел и установите scale до 3 для каждого измерения.
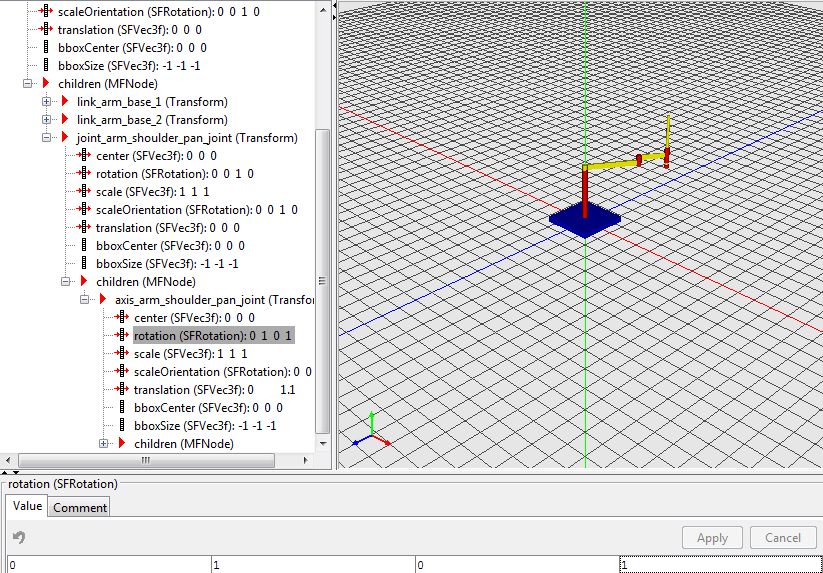
Процесс импорта создает в иерархии модели некоторые специальные Transform узлы, облегчающие управление моделями. Каждое вращательное соединение в модели SDF представлено символом Transform узел с именем, начинающимся с axis_. Эти узлы имеют оси вращения, определенные таким образом, чтобы элементы модели перемещались последовательно, если задать другое значение угла поворота.
Изменение угла поворота узла вращательного соединения. Например, разверните children узел, затем joint_arm_shoulder_pan_joint узел, затем childrenи, наконец, axis_arm_shoulder_pan_joint. Для rotation установите для четвертого элемента значение 1.
Совет
Если этот виртуальный мир связан с блоком VR Sink в модели Simulink, можно использовать блок VR Signal Expander, чтобы задать только угол поворота (четвертый элемент вектора поворота) axis_xxx
Transform вращение узла. Оставьте первые три элемента вектора без изменений. Этот подход сохраняет согласованность робота с тем, как авторы модели определяют движение деталей робота.
При импорте модели она часто не отображается на начальном виде виртуального мира. При необходимости создайте точку обзора для отображения импортированной модели при открытии виртуального мира. Если импортированная модель не видна:
В редакторе 3D World Editor выберите ROOT узел.
Выберите «Узлы» > «Добавить» > «Привязываемый» > «Точка обзора».
Для наблюдения за импортированной моделью перейдите в подходящее место в сцене.
Заполните свойства точек обзора текущими настройками камеры. На панели древовидной иерархии щелкните правой кнопкой мыши точку обзора и выберите «Копировать значения из текущей камеры».
Спасите виртуальный мир.
Импорт URDF преобразует иерархию связей и соединений роботов в иерархию преобразований VRML или X3D. Он импортирует только свойства визуализации из каждой ссылки. Соединения представлены преобразованиями, сохраняющими оси вращения исходных вращающихся соединений и совмещение осей призматических соединений.
Импорт SDF преобразует иерархию объектов модели SDF в VRML или X3D иерархию преобразований так же, как импорт URDF. Он поддерживает подмножество объектов формата SDF и ограничен визуальными объектами в Model иерархия элементов. Поддержанный Geometry элементы являются геометрическими примитивами и сетками.
