В этом примере показано, как настроить компенсатор с помощью методов автоматической настройки в конструкторе систем управления.
Чтобы выбрать метод автоматической настройки, в конструкторе систем управления щелкните Методы настройки.
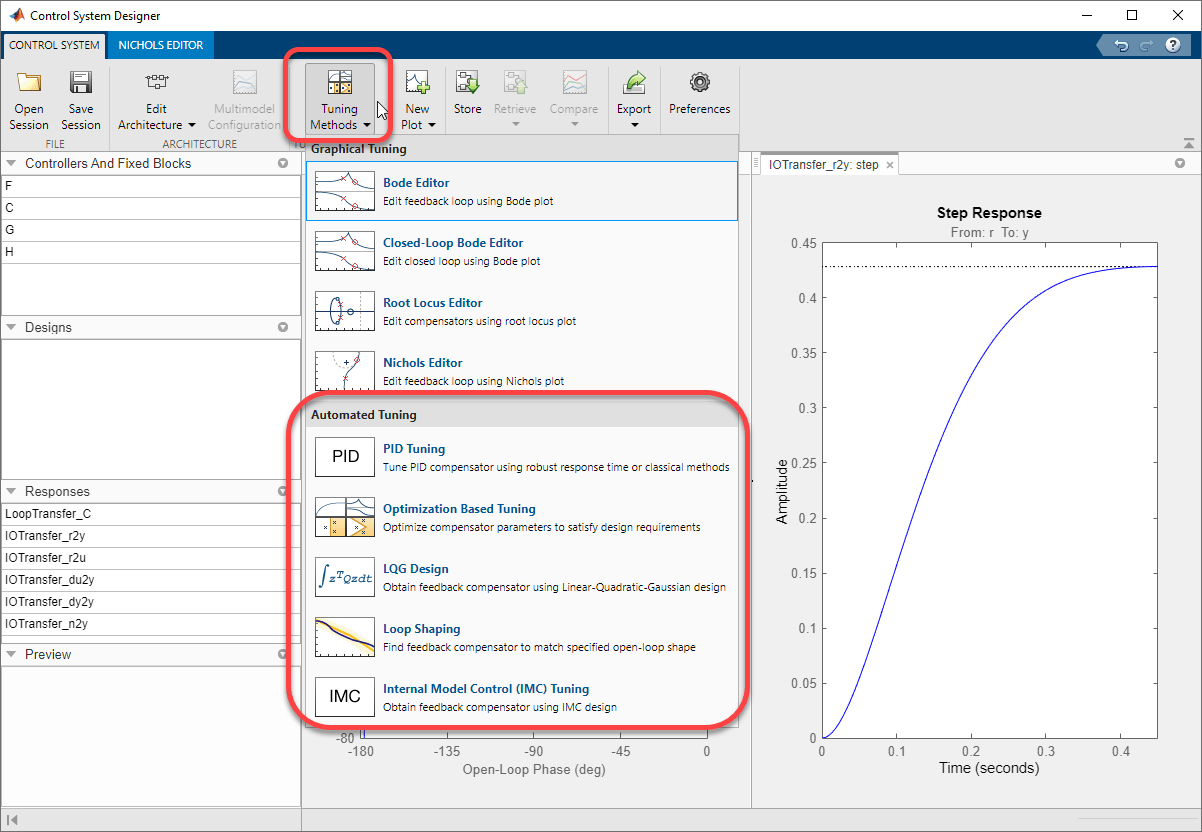
Выберите один из следующих методов настройки:
PID Tuning - Настройка PID для балансировки производительности и надежности или использования классических формул настройки.
Optimization Based Tuning - Оптимизация параметров компенсатора с использованием проектных требований, реализованных на графиках графической настройки и анализа (требуется программное обеспечение Simulink ® Design Optimization™).
LQG Synthesis - Разработать контроллер со стабилизирующей обратной связью полного порядка в виде линейно-квадратично-гауссова (LQG) трекера.
Loop Shaping
Free-form structure - Найдите стабилизирующий контроллер обратной связи полного порядка с заданной полосой пропускания или формой разомкнутого контура (требуется программное обеспечение Toolbox™ надежного управления).
Fixed structure - Настройка заданного пользователем стабилизирующего контроллера обратной связи с заданной полосой пропускания или формой разомкнутого контура.
Internal Model Control (IMC) Tuning - Получение стабилизирующего контроллера обратной связи полного порядка с использованием метода проектирования IMC.
В диалоговом окне выбранного метода настройки в разделе Компенсатор выберите компенсатор и цикл для настройки. Для определения структуры компенсатора можно использовать редактор компенсаторов. Дополнительные сведения см. в разделе Правка компенсатора Dynamics.
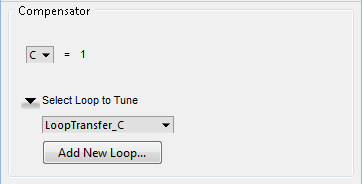
Компенсатор - выберите компенсатор для настройки из выпадающего списка. Приложение отображает текущую функцию передачи компенсатора.
Выберите Loop to Tune - выберите существующую функцию передачи с разомкнутым контуром для настройки из раскрывающегося списка. В браузере данных можно выбрать любую функцию переноса с разомкнутым контуром, включающую последовательно выбранный компенсатор.
Добавить новый цикл - создать новый цикл для настройки. В диалоговом окне «Функция передачи с разомкнутым контуром» выберите сигналы и отверстия контура для настройки функции передачи с разомкнутым контуром.
Примечание
При настройке на основе оптимизации компенсатор и цикл для настройки таким образом не указываются. Вместо этого необходимо определить структуру компенсатора и выбрать параметры компенсатора и предварительного фильтра для оптимизации. Дополнительные сведения см. в разделе Выбор перестраиваемых элементов компенсатора (Simulink Design Optimization).
Структура компенсатора сохраняется в виде полюсов и нулей после настройки, за исключением случаев, когда выполняется настройка на основе оптимизации.
С помощью конструктора систем управления можно автоматически настроить любой из следующих типов ПИД-контроллеров:
P - Только пропорциональное управление
I - Только интегральное управление
PI - Пропорциональное интегральное управление
ПД - Пропорциональное управление производной
PDF - Пропорциональное управление производной с фильтром нижних частот на термине производной
PID - Пропорциональный составной производный контроль
PIDF - Пропорциональный составной производный контроль с фильтром нижних частот на производном термине
Для открытия диалогового окна «Настройка PID» в конструкторе систем управления нажмите «Методы настройки» и выберите «Настройка PID».
Алгоритм надежного времени отклика автоматически настраивает параметры PID, чтобы сбалансировать производительность и надежность. Используя метод надежного времени отклика, можно:
Настройте все параметры для любого типа PID-контроллера.
Проектирование для стабильных, нестабильных или интегрированных установок.
Чтобы настроить компенсатор следующим образом:
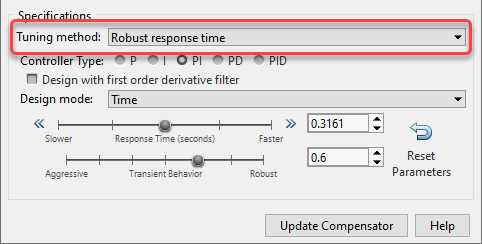
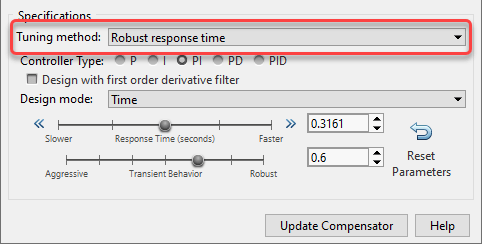
В диалоговом окне «Настройка PID» в разделе «Спецификации» в раскрывающемся списке «Метод настройки» выберите Robust response time.
Выберите тип контроллера. При выборе PD или PID установите флажок «Дизайн с производным фильтром первого порядка» для проектирования контроллера PDF или PIDF соответственно.
Совет
Добавление производного действия к контроллеру дает алгоритму больше свободы для достижения как адекватного запаса фазы, так и более быстрого времени отклика.
В раскрывающемся списке Режим разработки выберите один из следующих вариантов.
Time - Укажите производительность контроллера с помощью параметров временной области.
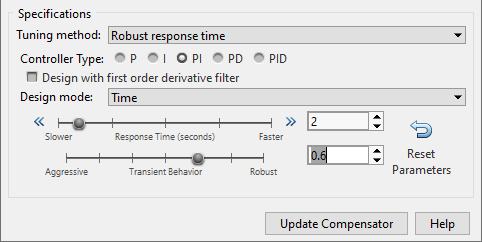
Время отклика - укажите более быстрое или более медленное время отклика контроллера. Чтобы изменить время отклика в десять раз, используйте левую или правую стрелки.
Переходное поведение - укажите переходное поведение контроллера. Вы можете сделать контроллер более агрессивным при отклонении возмущений или более устойчивым к неуверенности завода.
Frequency - Укажите производительность контроллера с помощью параметров частотной области.
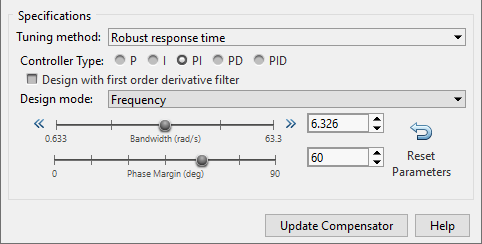
Полоса пропускания - определяет полосу пропускания системы управления по замкнутому контуру. Для увеличения времени отклика увеличьте пропускную способность. Чтобы изменить пропускную способность в десять раз, используйте левую или правую стрелки.
Запас фазы (Phase Margin) - укажите целевой запас фазы для системы. Чтобы уменьшить перерасход и создать более надежный контроллер, увеличьте запас по фазе.
Чтобы применить указанную конструкцию контроллера к выбранному компенсатору, щелкните Обновить компенсатор (Update Compensator).
Примечание
Если ранее структура контроллера была задана вручную или с помощью другого метода автоматической настройки, эта структура будет потеряна при нажатии кнопки Обновить компенсатор.
По умолчанию приложение автоматически вычисляет параметры контроллера для сбалансированной производительности и надежности. Чтобы вернуться к этим параметрам по умолчанию в любое время, щелкните Сбросить параметры (Reset Parameters).
Для настройки контроллеров P, PI, PID и PIDF можно использовать классические формулы проектирования PID. Следующие расчетные формулы:
Требуется стабильная или интегрирующая установка. Дополнительные сведения об эффективной установке, отображаемой компенсатором, см. в разделе Эффективная установка для настройки.
Не удается настроить фильтр производных. При выборе контроллера PIDF классические методы проектирования устанавливают постоянную времени фильтра на Td/10, где Td - настроенное производное время.
Чтобы настроить компенсатор классическим методом:
В диалоговом окне «Настройка PID» в разделе «Спецификации» в раскрывающемся списке «Метод настройки» выберите Classical design formulas.
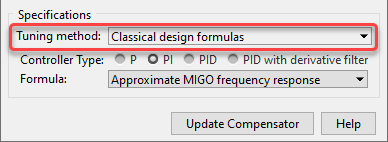
Выберите тип контроллера.
Совет
Добавление производного действия к компенсатору дает алгоритму больше свободы для достижения как адекватного запаса фазы, так и более быстрого времени отклика.
В раскрывающемся списке «Формула» выберите классическую формулу конструкции.
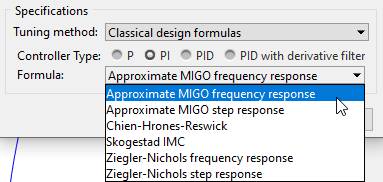
Approximate MIGO frequency response - Вычислять параметры контроллера с использованием оптимизации интегрального усиления с замкнутым контуром, частотной областью и приблизительным M-ограничением (см. [1]).
Approximate MIGO step response - Вычислите параметры контроллера, используя оптимизацию интегрального коэффициента усиления с разомкнутым контуром, временной областью и приблизительным M-ограничением (см. [1]).
Chien-Hrones-Reswick - аппроксимировать установку как модель первого порядка с задержкой по времени и вычислить параметры PID с помощью таблицы поиска Chien-Hrones-Reswick для 0% превышения и отклонения нарушения (см. [2]).
Skogestad IMC - аппроксимировать завод как модель первого порядка с задержкой по времени и вычислить параметры PID с помощью правил проектирования Skogestad (см. [3]).
Примечание
Этот метод отличается от выбора параметра Внутренняя настройка управления моделью в качестве метода настройки компенсатора полного порядка.
Ziegler-Nichols frequency response - Вычислите параметры контроллера из таблицы поиска Циглера-Николса на основе конечного коэффициента усиления и частоты системы (см. [2]).
Ziegler-Nichols step response - аппроксимировать установку как модель первого порядка с задержкой по времени и вычислить параметры PID с помощью метода проектирования Циглера-Николса (см. [2]).
Применить указанную конструкцию контроллера к выбранному компенсатору. Щелкните Обновить компенсатор (Update Compensator).
Примечание
Если ранее структура контроллера была задана вручную или с помощью другого метода автоматической настройки, эта структура будет потеряна при нажатии кнопки Обновить компенсатор.
Настройка на основе оптимизации доступна только в том случае, если установлено программное обеспечение Simulink Design Optimization. Этот метод можно использовать для проектирования систем управления для моделей LTI путем оптимизации параметров контроллера.
Примечание
Настройка на основе оптимизации изменяет только значения параметров контроллера, а не саму структуру контроллера. Сведения о добавлении или удалении элементов компенсатора см. в разделе Правка динамики компенсатора.
Чтобы создать контроллер с помощью настройки на основе оптимизации, выполните следующие действия.
Определите структуру компенсаторов, которые требуется настроить. Как правило, начальный контроллер создается вручную или с помощью другого метода автоматической настройки.
Откройте диалоговое окно Оптимизация ответа (Response Optimization). В конструкторе систем управления щелкните Методы настройки (Tuning Methods) и выберите Настройка на основе оптимизации (Optimization-Based Tuning).
Выберите параметры компенсатора для оптимизации. На вкладке Компенсаторы (Compensators) в столбце Оптимизировать (Optimize) выберите элементы компенсатора для настройки.
Можно оптимизировать элементы для любого компенсатора, указанного в браузере данных.
Все элементы, которые не выбраны в столбце Оптимизировать (Optimize), остаются на своих текущих значениях во время оптимизации.
Для каждого элемента компенсатора укажите:
Начальное предположение - начальная точка для алгоритма оптимизации. Чтобы использовать текущий элемент Значение как начальное предположение, щелкните строку в таблице и выберите Использовать значение как начальное предположение.
Минимальные и максимальные границы для значения элемента. Оптимизация ограничивает результаты поиска указанным диапазоном.
Типичный коэффициент масштабирования значения для нормализации элементов компенсатора.
На вкладке Требования к конструкции (Design Requirements) в столбце Оптимизировать (Optimize) выберите требования к конструкции, которые необходимо удовлетворить при оптимизации.
Каждое требование к конструкции связано с графиком конкретного ответа в браузере данных.
Сведения о добавлении и редактировании требований к конструкции см. в разделе Требования к конструкции.
(необязательно) Настройте параметры оптимизации. На вкладке Оптимизация (Optimization) щелкните Параметры оптимизации (Optimization options).
Щелкните Начать оптимизацию (Start Optimization).
Примеры настройки на основе оптимизации см. в разделах Оптимизация системы LTI для соответствия требованиям частотной области (оптимизация проектирования Simulink) и Оптимизация проектирования на основе PID-контроллера для линеаризованной модели Simulink (GUI) (Оптимизация проектирования Simulink).
Линейно-квадратично-гауссово (LQG) управление - это методика проектирования оптимальных динамических регуляторов и трекеров уставок. Этот метод позволяет отличать рабочие характеристики и усилия по управлению, а также учитывать нарушения технологического процесса и помехи измерений.
Синтез LQG генерирует контроллер обратной связи полного порядка, который гарантирует стабильность по замкнутому контуру. Проектируемый контроллер содержит интегратор, который гарантирует нулевую стационарную ошибку для установок без свободного дифференциатора.

Для проектирования контроллера LQG:
Откройте диалоговое окно Синтез LQG (LQG Synthesis). В конструкторе систем управления щелкните Методы настройки (Tuning Methods) и выберите Синтез LQG (LQG Synthesis).
Укажите переходное поведение контроллера с помощью ползунка ответа контроллера. Вы можете сделать контроллер более агрессивным при отклонении возмущений или более устойчивым к неуверенности завода. Если вы считаете, что ваша модель точна и что управляемая переменная имеет достаточно большой диапазон, предпочтителен агрессивный контроллер.
Укажите оценку уровня выходного шума измерения для приложения с помощью ползунка «Шум измерения». Чтобы создать более надежный контроллер, укажите большую оценку шума.
Укажите настройку заказа контроллера с помощью ползунка Требуемый заказ контроллера. Максимальный заказ контроллера зависит от эффективной динамики завода.
Применить указанную конструкцию контроллера к выбранному компенсатору. Щелкните Обновить компенсатор (Update Compensator).
Примечание
Если ранее структура контроллера была задана вручную или с помощью другого метода автоматической настройки, эта структура будет потеряна при нажатии кнопки Обновить компенсатор.
Пример синтеза LQG с помощью конструктора систем управления см. в разделе Проектирование LQG-трекера с помощью конструктора систем управления.
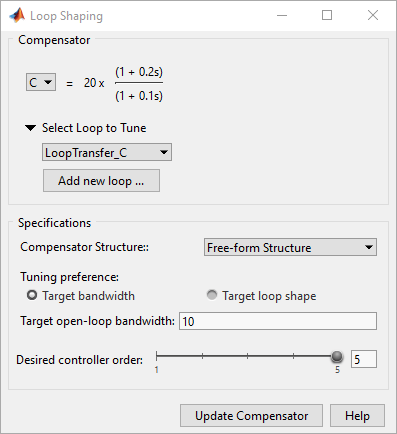
Формирование петель можно использовать для проектирования компенсаторов SISO в конструкторе систем управления для компенсаторов с произвольной или фиксированной конструкцией. Для формирования петель для разработки компенсаторов свободной формы требуется лицензия Rustive Control Toolbox. Формирование контура генерирует стабилизирующий контроллер обратной связи, чтобы как можно ближе соответствовать целевой форме контура. Эту форму цикла можно указать как полосу пропускания или частотную характеристику разомкнутого контура.
Чтобы сконструировать контроллер с помощью формирования цикла, выполните следующие действия.
Откройте диалоговое окно Формирование контура (Loop Shaping). В конструкторе систем управления щелкните Методы настройки (Tuning Methods) и выберите Формирование цикла (Loop Shaping).
Выберите одну из следующих настроек настройки:
Структура компенсатора - выберите одну из следующих структур компенсатора:
Free-form structure - Если установлено программное обеспечение Rustive Control Toolbox, можно использовать структуру компенсатора произвольной формы. Используйте ползунок Требуемый порядок контроллера, чтобы указать настройку порядка контроллера. Для определения структуры компенсатора можно использовать редактор компенсаторов. Дополнительные сведения об редакторе компенсаторов см. в разделе Правка динамики компенсаторов.
Fixed structure - При выборе Fixed Structure, разработчик системы управления будет использовать предоставленный заказ контроллера для выполнения автоматизированного формирования контура.
Целевая пропускная способность - Определяет Целевую пропускную способность разомкнутого контура, , чтобы произвести форму петли указанной пропускной способности по интегратору, .
Форма целевого контура - укажите форму целевого разомкнутого контура как tf, ss, или zpk объект. Чтобы ограничить частоты, на которых должна соответствовать форма целевого цикла, укажите диапазон частот для формирования цикла в виде двухэлементного вектора строки.
Укажите настройку заказа контроллера с помощью ползунка Требуемый заказ контроллера при использовании структуры компенсатора произвольной формы. Максимальный заказ контроллера зависит от эффективной динамики завода. При использовании фиксированной компенсаторной структуры конструктор систем управления использует предоставленный заказ контроллера для автоматического формирования контура.
Применить указанную конструкцию контроллера к выбранному компенсатору. Щелкните Обновить компенсатор (Update Compensator).
Примечание
Если ранее структура контроллера была задана вручную или с помощью другого метода автоматической настройки, эта структура будет потеряна при нажатии кнопки Обновить компенсатор.
Внутренний контроль модели (IMC) использует прогностическую модель динамики завода для вычисления действий управления. Конструкция IMC создает контроллер обратной связи полного порядка, который гарантирует стабильность по замкнутому контуру при отсутствии ошибки модели. Настроенный компенсатор также содержит интегратор, который гарантирует нулевой стационарный сдвиг для установок без свободного дифференциатора. Этот метод настройки можно использовать как для стабильных, так и для нестабильных растений.
Для проектирования контроллера IMC:
Выберите и настройте архитектуру управления IMC. В конструкторе систем управления щелкните Изменить архитектуру.
В диалоговом окне Изменить архитектуру (Edit Architecture) выберите пятую архитектуру управления и импортируйте модель завода, G1, прогнозную модель, G2 и модель возмущения Gd.
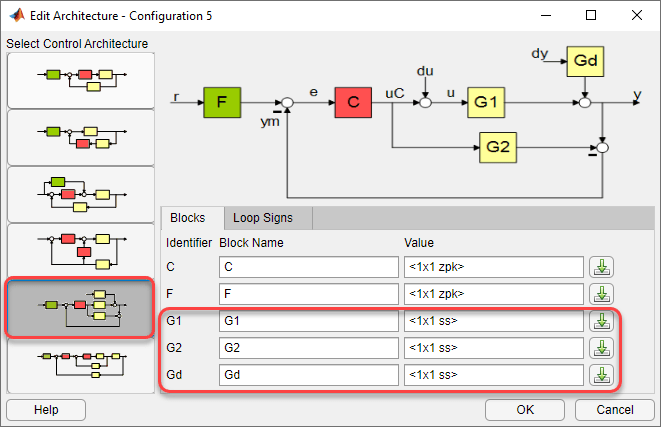
Нажмите кнопку ОК.
Откройте диалоговое окно «Настройка внутреннего управления моделью» (IMC). В конструкторе систем управления щелкните Методы настройки (Tuning Methods) и выберите Настройка внутренней модели (IMC).
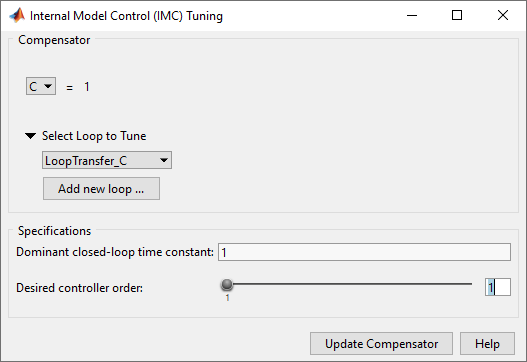
Укажите доминирующую постоянную времени замкнутого цикла. Значение по умолчанию составляет 5% от времени установки с разомкнутым контуром. В общем, увеличение этого значения замедляет работу системы с замкнутым контуром и делает ее более надежной.
Укажите настройку заказа контроллера с помощью ползунка Требуемый заказ контроллера. Максимальный заказ контроллера зависит от эффективной динамики завода.
Применить указанную конструкцию контроллера к выбранному компенсатору. Щелкните Обновить компенсатор (Update Compensator).
Примечание
Если ранее структура контроллера была задана вручную или с помощью другого метода автоматической настройки, эта структура будет потеряна при нажатии кнопки Обновить компенсатор.
Пример настройки IMC см. в разделе Проектирование внутреннего контроллера модели для установки химического реактора.
[1] Острём, К. Й. и Хегглунд, Т. «Замена правил тюнинга Циглера-Николса». Глава 7 в Расширенном ПИД-контроле, Парк исследовательских треугольников, ЧПУ: Общество КИПиА, систем и автоматики, 2006, стр. 233-270.
[2] Острём, К. Й. и Хегглунд, Т. «Циглер-Николс и родственные методы». Раздел 6.2 в Расширенном ПИД-контроле, Парк исследовательских треугольников, ЧПУ: Общество КИПиА, систем и автоматики, 2006, стр. 167-176.
[3] Skogestad, S., «Простые аналитические правила для уменьшения модели и настройки контроллера PID». Журнал технологического контроля, том 13, № 4, 2003, стр. 291-309.
Конструктор системы управления
