Установка перемещения, поворота, масштаба актера
Блок динамики транспортного средства/Сценарии транспортного средства/ Sim3D/ Sim3D Core
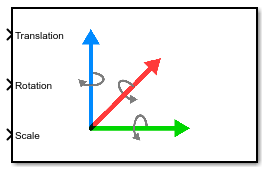
Блок Simulation 3D Actor Transform Set задает перемещение, поворот и масштаб актера в среде визуализации 3D.
Блок использует фиксированную на транспортном средстве систему координат, которая первоначально выровнена с инерциальной мировой системой координат.
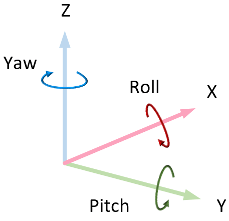
| Ось | Описание |
|---|---|
| X | Направление движения транспортного средства вперед Крен - поворот правой стороны вокруг оси X |
| Y | Простирается справа от транспортного средства, первоначально параллельно плоскости грунта Шаг - поворот вправо вокруг оси Y |
| Z | Выдвигается вверх Yaw - поворот левой стороны вокруг оси Z |
Актеры - это объекты сцены, поддерживающие 3D перемещение, поворот и масштаб. Детали являются компонентами актера. Компоненты не существуют сами по себе; они связаны с актером.
Совет
Убедитесь, что блок Simulation 3D Actor Transform Set выполняется перед блоком Simulation 3D Scene Configuration. Таким образом, Simulation 3D Actor Transform Set подготавливает данные сигнала до того, как среда визуализации Unreal Engine ® 3D получит их. Чтобы проверить порядок выполнения блока, щелкните его правой кнопкой мыши и выберите «Свойства». На вкладке Общие подтвердите следующие параметры приоритета:
Моделирование 3D Конфигурация сцены - 0
Симуляция 3D Набор преобразований актера - -1
Дополнительные сведения о порядке выполнения см. в разделе Управление и просмотр порядка выполнения.
Моделирование 3D Преобразование актера Получить | Моделирование 3D Получение камеры | Моделирование 3D конфигурация сцены | Датчик рельефа транспортного средства

