Хранилище данных для данных метки ограничивающей рамки
boxLabelDatastore объект создает хранилище данных для данных метки ограничивающей рамки. Этот объект используется для чтения данных ограничительной рамки с метками для обнаружения объектов.
Чтение данных метки ограничивающей рамки из boxLabelDatastore объект, используйте read функция. Эта функция объекта возвращает массив ячеек с двумя или тремя столбцами. Можно создать хранилище данных, объединяющее boxLabelDatastore объект с ImageDatastore с использованием combine объектная функция. Использование объединенного хранилища данных для обучения детекторов объектов с использованием функций обучения, таких как trainYOLOv2ObjectDetector и trainFasterRCNNObjectDetector. Доступ к данным в хранилище данных и управление ими можно осуществлять с помощью объектных функций. Для изменения ReadSize свойство, можно использовать точечную нотацию.
blds = boxLabelDatastore(tbl1,...,tbln)boxLabelDatastore объект из одной или нескольких таблиц, содержащих данные маркированной ограничивающей рамки.
tbl1,...,tbln - Маркированные данные ограничивающей рамки (как отдельные аргументы)Данные ограничивающей рамки, помеченные как таблица с одним или несколькими столбцами. Каждая таблица соответствует набору меток. Ограничивающими прямоугольниками могут быть выровненные по оси прямоугольники, повернутые прямоугольники или кубоиды. В таблице ниже описан формат ограничивающих рамок.
| Ограничивающая рамка | Описание |
|---|---|
| Выровненный по оси прямоугольник |
Определяется в координатах пикселей как M-by-4 числовая матрица со строками вида [x y w h] , где :
|
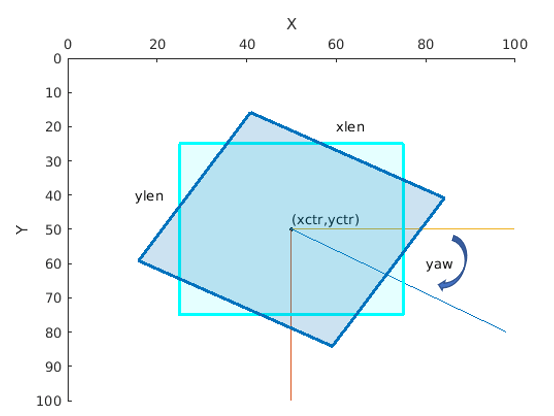
| Повернутый прямоугольник |
Определяется в пространственных координатах как M-by-5 числовая матрица со строками вида [xctr yctr xlen ylen yaw ], где:
|
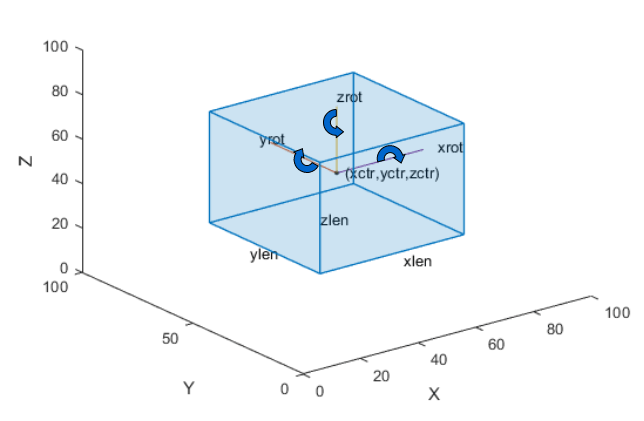
| Cuboid |
Определяется в пространственных координатах как M-by-9 числовая матрица со строками вида [xctr yctr zctr xlen ylen zlen xrot yrot zrot], где :
На рисунке показано, как эти значения определяют положение кубоида.
|
Таблица с одним или несколькими столбцами:
Все столбцы содержат ограничивающие рамки. Каждый столбец должен быть вектором ячейки, содержащим матрицы M-на-N. M - количество изображений, и N представляет один класс объектов, например stopSign, carForth или carFront.
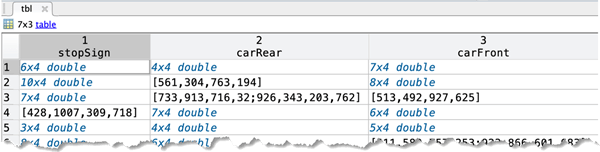
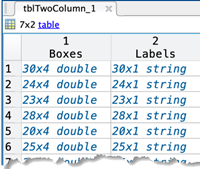
Таблица с двумя столбцами.
Первый столбец содержит ограничивающие рамки. Второй столбец должен быть вектором ячейки, который содержит имена меток, соответствующие каждой ограничивающей рамке. Каждый элемент в векторе ячейки должен быть M-by-1 категориальным или строковым вектором, где M представляет количество меток.
Чтобы создать таблицу истинности земли, используйте приложение Image Labeler или Video Labeler. Чтобы создать таблицу обучающих данных из сгенерированной истинности земли, используйте objectDetectorTrainingData функция.
Типы данных: table
bSet - Места расположения блоковblockLocationSet объектРасположения блоков, указанные как blockLocationSet объект. Этот объект можно создать с помощью balanceBoxLabels функция.
combine | Объединение данных из нескольких хранилищ данных |
countEachLabel | Количество вхождений меток пикселов или полей |
hasdata | Определение доступности данных для чтения из хранилища данных |
numpartitions | Количество разделов для хранилища данных |
partition | Разбиение хранилища данных меток |
preview | Чтение первой строки данных в хранилище данных |
progress | Процент данных, считанных из хранилища данных |
read | Считывание данных из хранилища данных |
readall | Считывание всех данных в хранилище данных |
reset | Сброс хранилища данных в исходное состояние |
shuffle | Возврат перетасованной версии хранилища данных |
subset | Создание подмножества хранилища данных или набора файлов |
transform | Преобразовать хранилище данных |
isPartitionable | Определение возможности разделения хранилища данных |
isShuffleable | Определение возможности тасования хранилища данных |
balanceBoxLabels | estimateAnchorBoxes | yolov2Layers | analyzeNetwork (инструментарий для глубокого обучения)