Извлечение компонентов управления SISO из 2-DOF ПИД-регуляторов
[ разлагает 2-DOF ПИД-регулятор C,X] =
getComponents(C2,looptype)C2 в два компонента управления SISO. Один из компонентов управления, C, является 1-DOF ПИД-регулятор. Другой, X, является динамической системой SISO. Когда C и X соединяются в структуре цикла, заданной как looptypeполученная система с обратной связью эквивалентна 2-DOF циклу управления.
Дополнительные сведения о 2-DOF ПИД управлении архитектурами см. в разделе ПИД-регуляторов с двумя степенями свободы.
C2 - 2-DOF ПИД-регуляторpid2 | объекта pidstd2 объект2-DOF ПИД-регуляторы для разложения, заданные как pid2 или pidstd2 объект контроллера.
looptype - Цикл'feedforward' (по умолчанию) | 'feedback' | 'filter'Структура цикла для разложения контроллера 2-DOF, заданная как 'feedforward', 'feedback', или 'filter'. Они соответствуют следующим декомпозициям и архитектурам управления:
'feedforward' — C является обычным ПИД-контроллером SISO, который принимает сигнал ошибки за свой вход. X является контроллером с feedforward, как показано:
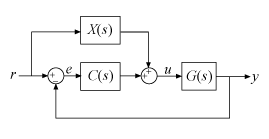
Если C2 является непрерывным временем формы, тогда компоненты задаются:
Следующая команда создает систему с обратной связью от r до y для строения с feedforward.
T = G*(C+X)*feedback(1,G*C);
'feedback' — C является обычным ПИД-контроллером SISO, который принимает сигнал ошибки за свой вход. X - контроллер обратной связи от y до u, как показано:
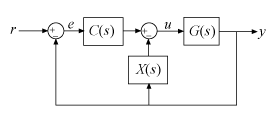
Если C2 является непрерывным временем формы, тогда компоненты задаются:
Следующая команда создает систему с обратной связью от r до y для строения обратной связи.
T = G*C*feedback(1,G*(C+X));
'filter' — X является предфильтром на опорный сигнал. C является обычным ПИД-контроллером SISO, который принимает за свой вход различие между фильтрованной ссылкой и выходом, как показано:
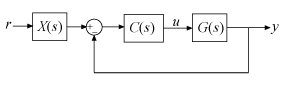
Если C2 является непрерывным временем формы, тогда компоненты задаются:
Следующая команда создает систему с обратной связью от r до y для строения фильтра.
T = X*feedback(G*C,1);
Формулы, показанные выше, относятся к контроллерам в непрерывной параллельной форме. Стандартные контроллеры и контроллеры за дискретное время могут быть разложены на аналогичные строения. getComponents команда работает со всеми 2-DOF объектами ПИД-регулятора.
