Сконфигурируйте монокулярный датчик камеры
The monoCamera объект содержит информацию о строении монокулярного датчика камеры. Строение информация включает в себя внутреннюю составляющую камеры, внешнюю составляющую камеры, такую как ее ориентация (как описан тангаж, рыскание и крен), и местоположение камеры в транспортном средстве. Для оценки собственных и внешних параметров камеры смотрите Калибровку монокулярной камеры.
Для изображений, захваченных камерой, можно использовать imageToVehicle и vehicleToImage функции для преобразования местоположений точек между координатами изображения и координатами транспортного средства. Эти функции применяют проективные преобразования (гомографию), которые позволяют вам оценить расстояния от камеры, установленной на транспортное средство, до мест на плоской дорожной поверхности.
sensor = monoCamera( создает intrinsics,height)monoCamera объект, который содержит строение монокулярного датчика камеры, учитывая собственные параметры камеры и высоту камеры над землей. intrinsics и height установите Intrinsics и Height свойства камеры.
sensor = monoCamera(intrinsics,height,Name,Value)monoCamera(intrinsics,1.5,'Pitch',1) создает монокулярный датчик камеры, который находится на высоте 1,5 метра над землей и имеет 1-градусный тангаж к земле. Заключайте каждое имя свойства в кавычки.
Intrinsics - Параметры собственной камерыcameraIntrinsics |
объекта cameraParametersСобственные параметры камеры, заданные как a cameraIntrinsics или cameraParameters объект. К параметрам собственной камеры относятся фокусное расстояние и оптический центр камеры, а также размер изображения, получаемого камерой.
Вы можете задать это свойство при создании объекта. После создания объекта это свойство доступно только для чтения.
Height - Высота от поверхности дороги до датчика камерыВысота от дорожного покрытия до датчика камеры, заданная как реальный скаляр. Высота - это перпендикулярное расстояние от земли до фокальной точки камеры. Задайте высоту в мировых единицах измерения, таких как метры. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
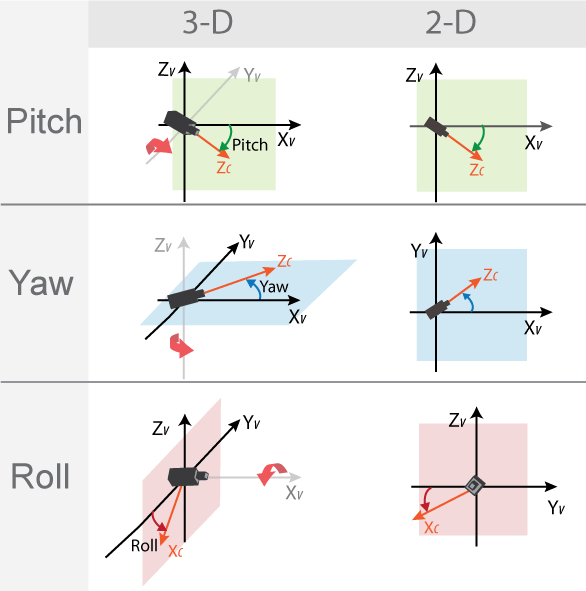
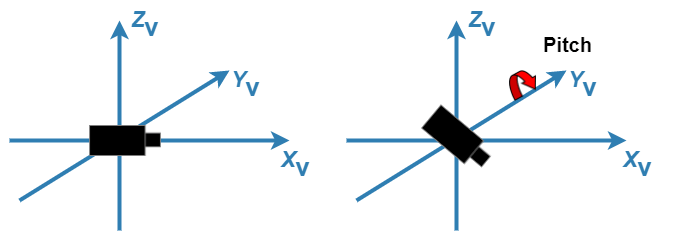
Pitch - Угол тангажаУгол тангажа между горизонтальной плоскостью транспортного средства и оптической осью камеры, заданный как действительный скаляр в степенях. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
Pitch использует конвенцию ISO для вращения с положительным углом по часовой стрелке при взгляде в положительном направлении оси < reservedrangesplaceholder0 > V транспортного средства.
Для получения дополнительной информации смотрите Угловые направления.
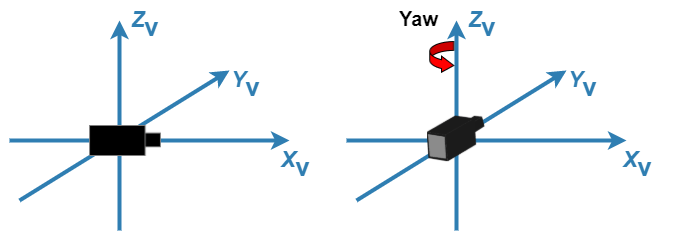
Yaw - Угол рысканияУгол рыскания между осью < reservedrangesplaceholder0 > V транспортного средства и оптической осью камеры, заданный как действительный скаляр в степенях. Чтобы оценить это значение, используйтеestimateMonoCameraParameters функция.
Yaw использует конвенцию ISO для вращения с положительным углом по часовой стрелке при взгляде в положительном направлении оси < reservedrangesplaceholder0 > V транспортного средства.
Для получения дополнительной информации смотрите Угловые направления.
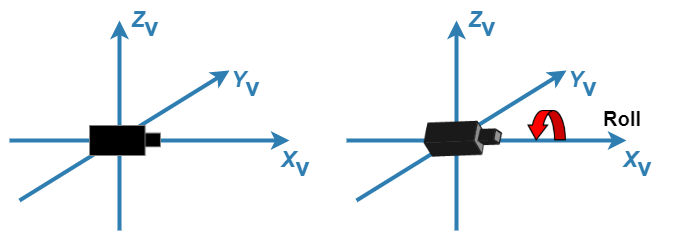
Roll - Угол кренаУгол крена камеры вокруг ее оптической оси, возвращаемый как действительный скаляр в степенях. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
Roll использует конвенцию ISO для вращения с положительным углом по часовой стрелке при взгляде в положительном направлении оси < reservedrangesplaceholder0 > V транспортного средства.
Для получения дополнительной информации смотрите Угловые направления.
SensorLocation - Расположение центра датчика камеры [0 0] (по умолчанию) | двухэлементный векторРасположение центра датчика камеры, заданное как двухэлементный вектор вида [x y]
. Используйте это свойство для изменения расположения камеры. Модули находятся в системе координат транспортного средства (X V, Y V, Z V).
По умолчанию датчик камеры расположен в начале координат (X V, Y V), на высоте, заданной Height.
WorldUnits - Блоки мировой системы координат'meters' | вектор символов | строковый скалярМировые модули измерения системы координат, заданные как вектор символов или строковый скаляр. Это свойство хранит только тип модуля и не влияет ни на какие вычисления. Любой текст действителен.
Вы можете задать это свойство при создании объекта. После создания объекта это свойство доступно только для чтения.
imageToVehicle | Преобразуйте координаты изображения в координаты автомобиля |
vehicleToImage | Преобразуйте координаты транспортного средства в координаты изображения |
Создайте направленный вперед монокулярный датчик камеры, установленный на автомобиль , оборудованный датчиком. Исследуйте изображение, полученное с камеры, и определите местоположения в изображении как в координатах транспортного средства, так и в координатах изображения.
Установите собственные параметры камеры. Задайте фокусное расстояние, главную точку плоскости изображения и размер выходного изображения. Модули указаны в пикселях. Сохраните внутренности как cameraIntrinsics объект.
focalLength = [800 800]; principalPoint = [320 240]; imageSize = [480 640]; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Задайте положение камеры. Установите камеру на 2.18 метра над землей с 14-градусным тангажом к земле.
height = 2.18; pitch = 14;
Определите монокулярный датчик камеры, используя собственные параметры камеры и положение камеры. Загрузите изображение с камеры.
sensor = monoCamera(intrinsics,height,'Pitch',pitch); Ioriginal = imread('road.png'); figure imshow(Ioriginal) title('Original Image')

Определите координаты изображения точки 10 метров непосредственно перед камерой. Ось X указывает вперед от камеры, а ось Y - налево.
xyVehicleLoc1 = [10 0]; xyImageLoc1 = vehicleToImage(sensor,xyVehicleLoc1)
xyImageLoc1 = 1×2
320.0000 216.2296
Отобразите точку на изображении.
IvehicleToImage = insertMarker(Ioriginal,xyImageLoc1); IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,'10 meters'); figure imshow(IvehicleToImage) title('Vehicle-to-Image Point')

Определите координаты транспортного средства точки, которая лежит на поверхности дороги на изображении.
xyImageLoc2 = [300 300]; xyVehicleLoc2 = imageToVehicle(sensor,xyImageLoc2)
xyVehicleLoc2 = 1×2
6.5959 0.1732
Точка находится примерно в 6,6 метрах перед транспортным средством и примерно в 0,17 метрах налево от центра транспортного средства.
Отобразите транспортное средство координаты точки на изображении.
IimageToVehicle = insertMarker(Ioriginal,xyImageLoc2); displayText = sprintf('(%.2f m, %.2f m)',xyVehicleLoc2); IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText); figure imshow(IimageToVehicle) title('Image-to-Vehicle Point')

Создайте датчик зрения с помощью монокулярного строения камеры и сгенерируйте обнаружения от этого датчика.
Задайте собственные параметры камеры и создайте monoCamera объект из этих параметров. Камера установлена на верхнюю часть автомобиля , оборудованного датчиком на высоте 1,5 метра над землей и тангажом 1 степени к земле.
focalLength = [800 800];
principalPoint = [320 240];
imageSize = [480 640];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
height = 1.5;
pitch = 1;
monoCamConfig = monoCamera(intrinsics,height,'Pitch',pitch);Создайте генератор обнаружения зрения с помощью монокулярного строения камеры.
visionSensor = visionDetectionGenerator(monoCamConfig);
Сгенерируйте сценарий вождения с автомобиль , оборудованный датчиком и двумя целевыми автомобилями. Положение первого целевого автомобиля на 30 метров непосредственно перед автомобилем , оборудованным датчиком. Расположите второй целевой автомобиль на 20 метров перед автомобиль , оборудованный датчиком, но смещите налево на 3 метра.
scenario = drivingScenario; egoVehicle = vehicle(scenario,'ClassID',1); targetCar1 = vehicle(scenario,'ClassID',1,'Position',[30 0 0]); targetCar2 = vehicle(scenario,'ClassID',1,'Position',[20 3 0]);
Используйте график птичьего глаза, чтобы отобразить контуры транспортного средства и зону покрытия датчика.
figure bep = birdsEyePlot('XLim',[0 50],'YLim',[-20 20]); olPlotter = outlinePlotter(bep); [position,yaw,length,width,originOffset,color] = targetOutlines(egoVehicle); plotOutline(olPlotter,position,yaw,length,width); caPlotter = coverageAreaPlotter(bep,'DisplayName','Coverage area','FaceColor','blue'); plotCoverageArea(caPlotter,visionSensor.SensorLocation,visionSensor.MaxRange, ... visionSensor.Yaw,visionSensor.FieldOfView(1))

Получите положения целевых автомобилей с точки зрения автомобиля , оборудованного датчиком. Используйте эти положения, чтобы сгенерировать обнаружения от датчика.
poses = targetPoses(egoVehicle); [dets,numValidDets] = visionSensor(poses,scenario.SimulationTime);
Отображение (X, Y) позиций допустимых обнаружений. Для каждого обнаружения (X, Y) положения являются первыми двумя значениями Measurement поле.
for i = 1:numValidDets XY = dets{i}.Measurement(1:2); detXY = sprintf('Detection %d: X = %.2f meters, Y = %.2f meters',i,XY); disp(detXY) end
Detection 1: X = 19.09 meters, Y = 2.79 meters Detection 2: X = 27.81 meters, Y = 0.08 meters
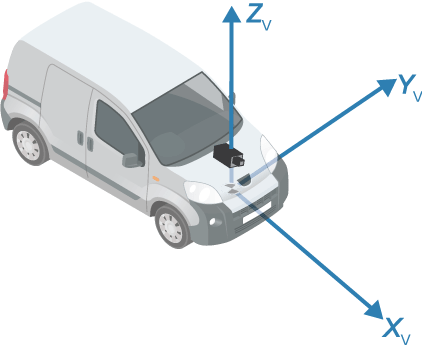
В системе координат транспортного средства (X V, Y V, Z V), заданной как monoCamera:
Ось X V указывает вперед от транспортного средства.
Ось Y V указывает налево, как видно при обращении вперед.
Ось Z V указывает вверх от земли, чтобы сохранить правую систему координат.
По умолчанию источник этой системы координат находится на поверхности дороги, непосредственно под центром камеры. Фокальная точка камеры определяет эту центральную точку.
Чтобы изменить размещение источника координат в системе координат транспортного средства, обновите SensorLocation свойство.
Для получения дополнительной информации о системе координат транспортного средства смотрите Системы координат в Automated Driving Toolbox.
Монокулярный датчик камеры использует направления положительного угла по часовой стрелке при взгляде в положительном направлении Z -, Y - и X - осей, соответственно.