Сгенерируйте радиолокационные обнаружения для сценария слежения
monostaticRadarSensor не рекомендуется, если не требуется генерация кода C/C + +. Использование fusionRadarSensor вместо этого. Для получения дополнительной информации см. раздел Вопросов совместимости.
The monostaticRadarSensor Система object™ генерирует обнаружения целей радаром моностатического наблюдения. Можно использовать monostaticRadarSensor объект в сценарии, содержащем движущиеся и стационарные платформы, такие как созданные с помощью trackingScenario. The monostaticRadarSensor объект может симулировать реальные обнаружения с добавлением случайного шума, а также генерировать ложные обнаружения предупреждений. В сложение можно использовать обнаружения, сгенерированные этим объектом, как вход в трекеры, такие как trackerGNN или trackerTOMHT.
Этот объект позволяет вам сконфигурировать сканирующий радар. Сканирующий радар изменяет свой угол обзора путем шага механического и электронного положения луча с шагами от углового диапазона, заданного в FieldOfView свойство. Радар сканирует общую область в азимуте и повышении, заданные пределами механического и электронного скана радара, MechanicalScanLimits и ElectronicScanLimits. Если для пределов сканирования азимута или повышения задано значение [0 0]затем сканирование по этой размерности для этого режима скана не выполняется. Если максимальная механическая скорость скана для азимута или повышения установлена равной нулю, то механическое сканирование по этой размерности не выполняется.
Используя одноэкспоненциальный режим, радар вычисляет смещения области значений и повышения, вызванные распространением через тропосферу. Смещение области значений означает, что измеренные диапазоны больше, чем диапазон линии видимости до цели. Смещение по повышению означает, что измеренные повышения находятся выше их истинных повышений. Смещения больше, когда путь линии визирования между радаром и целью проходит через более низкие высоты, потому что атмосфера толще.
Чтобы сгенерировать радиолокационные обнаружения:
Создайте monostaticRadarSensor Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
sensor = monostaticRadarSensor(SensorIndex)SensorIndex, и значения свойств по умолчанию.
sensor = monostaticRadarSensor(SensorIndex,Name,Value)monostaticRadarSensor(1,'DetectionCoordinates','Sensor rectangular') создает генератор радиолокационного обнаружения, который сообщает о обнаружениях в Декартовой системе координат датчика с индексом датчика, равным 1.
sensor = monostaticRadarSensor(SensorIndex,'No scanning')monostaticRadarSensor который указывает только на направление радиолокационной антенны. Механическое или электронное сканирование не выполняется. Этот синтаксис устанавливает ScanMode свойство к 'No scanning'.
sensor = monostaticRadarSensor(SensorIndex,'Raster')monostaticRadarSensor объект, который механически сканирует растровый шаблон. Размах растра составляет 90 ° по азимуту от -45 ° до + 45 ° и по повышению от горизонта до 10 ° над горизонтом. Свойства, заданные этим синтаксисом, см. в разделе Синтаксис удобства.
sensor = monostaticRadarSensor(SensorIndex,'Rotator')monostaticRadarSensor объект, который механически сканирует 360 ° по азимуту путем механического поворота антенны с постоянной скоростью. Когда вы задаете HasElevation на true, радиолокационная антенна механически указывает в сторону центра повышения поля зрения. Свойства, заданные этим синтаксисом, см. в разделе Синтаксис удобства.
sensor = monostaticRadarSensor(SensorIndex,'Sector')monostaticRadarSensor объект, который механически сканирует сектор азимута 90 ° от -45 ° до + 45 °. Настройка HasElevation на true указывает радиолокационную антенну в направлении центра поля зрения по повышению. Можно изменить ScanMode на 'Electronic' для электронного сканирования того же азимутального сектора. В этом случае антенна не наклоняется механически в электронном скане. Вместо этого лучи складываются в электронном виде, чтобы обработать всёся повышение, охватываемый пределами скана в одной скважине. Свойства, заданные этим синтаксисом, см. в разделе Синтаксис удобства.
dets
= sensor(targets,ins,simTime)ins, для сенсорной платформы. Информация INS используется алгоритмами отслеживания и слияния, чтобы оценить целевые положения в системе координат NED.
Чтобы включить этот синтаксис, установите HasINS свойство к true.
dets
= sensor(targets,interference,simTime)interference.
Чтобы включить этот синтаксис, установите HasInterference свойство к true.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Симулируйте радиолокационный сценарий.
sc = trackingScenario('UpdateRate',1);Создайте диспетчерскую вышку аэропорта с радаром наблюдения, расположенным в 15 метрах над землей. Радар вращается со скоростью 12,5 об/мин, и его поле зрения по азимуту составляет 5 степени, а поле зрения по повышению - 10 степени.
rpm = 12.5; fov = [5;10]; % [azimuth; elevation] scanrate = rpm*360/60; updaterate = scanrate/fov(1) % Hz
updaterate = 15
radar = monostaticRadarSensor(1,'Rotator', ... 'UpdateRate',updaterate, ... 'MountingLocation',[0 0 -15], ... 'MaxMechanicalScanRate',scanrate, ... 'FieldOfView',fov, ... 'AzimuthResolution',fov(1)); towermotion = kinematicTrajectory('SampleRate',1,'Position',[0 0 0],'Velocity',[0 0 0]); tower = platform(sc,'ClassID',1,'Trajectory',towermotion); aircraft1motion = kinematicTrajectory('SampleRate',1,'Position',[10000 0 1000],'Velocity',[-100 0 0]); aircraft1 = platform(sc,'ClassID',2,'Trajectory',aircraft1motion); aircraft2motion = kinematicTrajectory('SampleRate',1,'Position',[5000 5000 200],'Velocity',[100 100 0]); aircraft2 = platform(sc,'ClassID',2,'Trajectory',aircraft2motion);
Выполните 5 сканы.
detBuffer = {};
scanCount = 0;
while advance(sc)
simTime = sc.SimulationTime;
targets = targetPoses(tower);
[dets,numDets,config] = radar(targets,simTime);
detBuffer = [detBuffer;dets];
if config.IsScanDone
scanCount = scanCount + 1;
if scanCount == 5;
break;
end
end
endОбнаружение графиков
tp = theaterPlot; clrs = lines(3); rp = platformPlotter(tp,'DisplayName','Radar','Marker','s',... 'MarkerFaceColor',clrs(1,:)); pp = platformPlotter(tp,'DisplayName','Truth',... 'MarkerFaceColor',clrs(2,:)); dp = detectionPlotter(tp,'DisplayName','Detections',... 'MarkerFaceColor',clrs(3,:)); plotPlatform(rp,[0 0 0]) plotPlatform(pp,[targets(1).Position; targets(2).Position]) if ~isempty(detBuffer) detPos = cellfun(@(d)d.Measurement(1:3),detBuffer,... 'UniformOutput',false); detPos = cell2mat(detPos')'; plotDetection(dp,detPos) end

Датчик измеряет координаты цели. The Measurement и MeasurementNoise значения сообщаются в системе координат, заданной DetectionCoordinates свойство датчика.
Когда DetectionCoordinates свойство 'Scenario', 'Body', или 'Sensor rectangular', а Measurement и MeasurementNoise значения сообщаются в прямоугольных координатах. Скорости сообщаются только тогда, когда свойство скорости области значений, HasRangeRate, есть true.
Когда DetectionCoordinates свойство 'Sensor spherical', а Measurement и MeasurementNoise значения сообщаются в сферической системе координат, полученной из прямоугольной системы координат датчика. Повышение и частота области значений сообщаются только при HasElevation и HasRangeRate являются true.
Измерения упорядочиваются как [азимут, повышение, диапазон, скорость области значений]. Отчетность о повышении и скорости области значений зависит от соответствующих HasElevation и HasRangeRate значения свойств. Углы указаны в степенях, область значений - в метрах, а частота областей значений - в метрах в секунду.
Координаты измерения
| DetectionCoordinates | Координаты шума измерений и измерений | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Scenario' | Координатная зависимость от
| |||||||||||||||
'Body' | ||||||||||||||||
'Sensor rectangular' | ||||||||||||||||
'Sensor spherical' | Координатная зависимость от
|
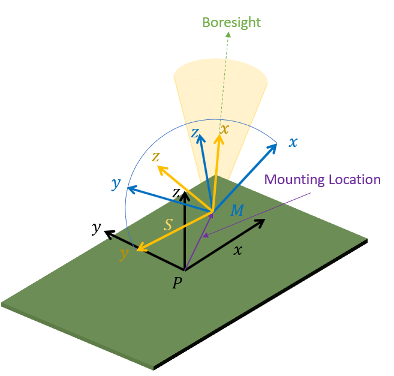
The MeasurementParameters свойство состоит из массива структур, которые описывают последовательность преобразований координат из дочерней системы координат в родительскую систему координат или обратные преобразования (см. Вращение системы координат). В большинстве случаев самой длинной необходимой последовательностью преобразований является сценарий Sensor → Platform →.
Если обнаружения сообщаются в сферических координатах и HasINS датчика установлено в falseтогда последовательность состоит только из одного преобразования от датчика к платформе. В преобразовании OriginPosition совпадает с MountingLocation свойство датчика. The Orientation состоит из двух последовательных вращений. Первое вращение, соответствующее MountingAngles свойство датчика, учитывает вращение от системы координат платформы (P) к монтажной системе координат датчика (M). Второе вращение, соответствующее азимуту и углам возвышения датчика, учитывает вращение от монтажной системы координат (M) датчика к сканирующей системе координат (S) датчика. В S системе координат x направление является направлением boresight, а y направление лежит внутри x - y плоскости монтажной системы координат датчика (M).
Если HasINS является trueпоследовательность преобразований состоит из двух преобразований - сначала формируйте систему координат сценария в систему координат платформы, затем из системы координат платформы в систему координат сканирования датчика. В первом преобразовании Orientation - поворот от системы координат сценария к системе координат платформы и OriginPosition - положение системы координат платформы относительно системы координат сценария.
Тривиально, если обнаружения сообщаются в прямоугольных координатах и HasINS платформы установлено в false, преобразование состоит только из тождеств.
Поля MeasurementParameters показаны здесь. Не все поля должны присутствовать в структуре. Набор полей и их значения по умолчанию могут зависеть от типа датчика.
| Область | Описание |
Frame | Перечисленный тип, указывающий на систему координат, используемую для сообщения измерений. Когда о обнаружениях сообщают с помощью прямоугольной системы координат, |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
OriginVelocity | Смещение скорости источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
Orientation | Матрица поворота 3 на 3 вещественные ортонормальные системы координат. Направление вращения зависит от |
IsParentToChild | Логический скаляр, указывающий, |
HasElevation | Логический скаляр, указывающий, включено ли в измерение повышение высоты. Для измерений, сообщаемых в прямоугольной системе координат, и если |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли сообщенные обнаружения измерения скорости. Для измерений, сообщаемых в прямоугольной системе координат, если |
Атрибуты объекта содержат дополнительную информацию об обнаружении:
| Признак | Описание |
TargetIndex | Идентификатор платформы, |
SNR | Отношение сигнала обнаружения к шуму в дБ. |
