Проектируйте сценарии отслеживания, конфигурируйте платформы и датчики, и генерируйте синтетические обнаружения объектов
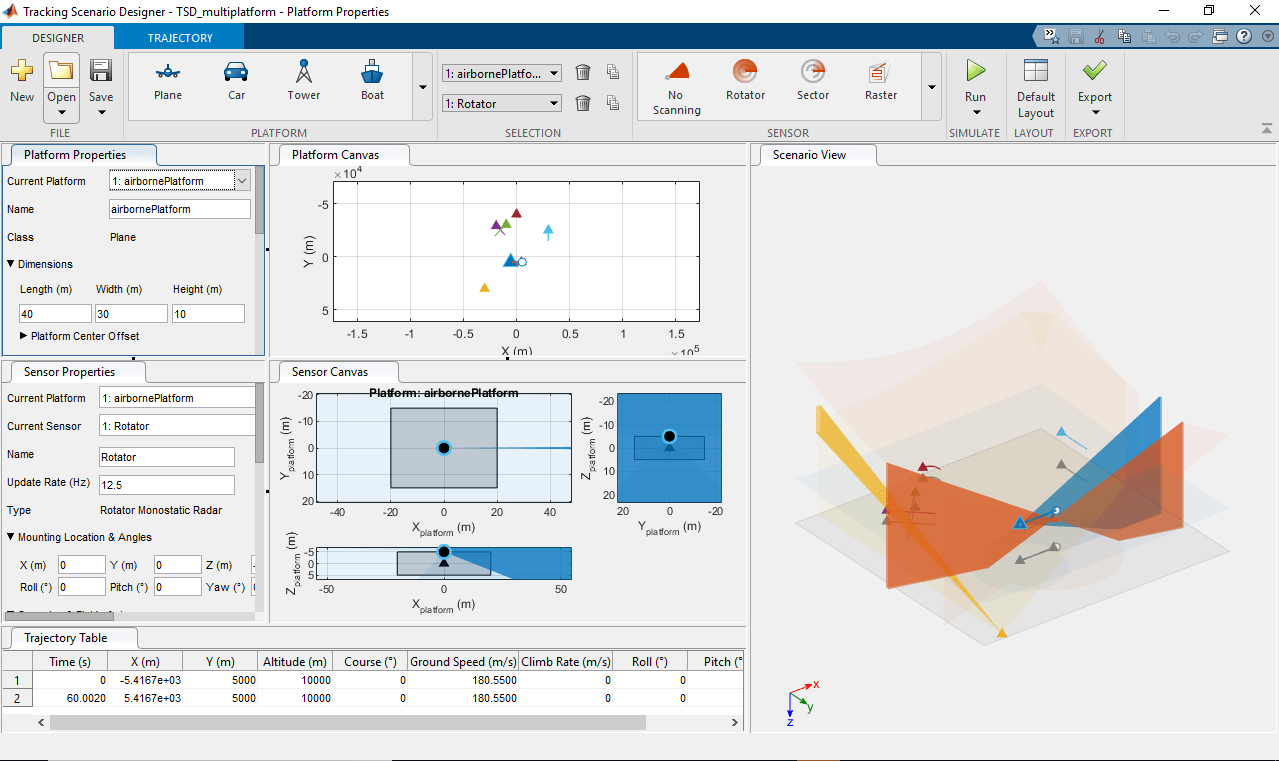
Приложение Tracking Scenario Designer позволяет вам проектировать и визуализировать синтетические сценарии отслеживания для проверки ваших систем оценки и отслеживания.
Используя приложение, вы можете:
Создайте платформы (включая самолеты, автомобили, башни и катера) с помощью интерактивного интерфейса и сконфигурируйте свойства платформы в сценарии отслеживания.
Сконфигурируйте 2D или 3D траектории (включая положение, ориентацию и скорости) платформ, используя траектории путевой точки в сценарии отслеживания.
Создайте радарные датчики, установленные на платформе, и сконфигурируйте свойства датчика.
Симулируйте сценарий отслеживания и динамически визуализируйте траектории платформы, покрытия датчика и обнаружения объектов.
Сгенерируйте MATLAB® код сценария и датчиков, а затем программно измените сценарий в прикладных целях. Можно также импортировать ранее сохраненный сценарий обратно в приложение для дальнейшей симуляции.
Импорт trackingScenario объект в приложении для визуализации и дальнейшего проекта сценария отслеживания. Ограничения импорта trackingScenario см. в разделе «Программное использование» объект.
MATLAB Toolstrip: На вкладке Apps, в разделе Signal processing and communications, щелкните значок приложения.![]()
Командная строка MATLAB: Ввод trackingScenarioDesigner.
Чтобы запустить Tracking Scenario Designer, используйте команду:
trackingScenarioDesigner
Чтобы добавить платформу в приложение, выберите одну платформу (tower, для примера) и нажмите вкладку PLATFORM Canvas, чтобы разместить платформу.
![]()
Изменить свойства платформы можно на вкладке «Свойства платформы». Для примера, чтобы установить центр платформы на источник, установите все координаты начального положения равными нулю в Initial Pose.
![]()
Можно также изменить длину, ширину и высоту платформы. По умолчанию в Tower смещение платформы в направлении z составляет половину высоты платформы, что помещает центр башни в ее дно. Если смещение равно нулю, центр платформы соединяется с геометрическим центром башни.
![]()
Смещение центра определяется как вектор положения от геометрического центра платформы до заданного центра платформы.
В приложении можно также задать неопределенность предполагаемого положения платформы через вкладку Pose Estimation. Значение каждого параметра на вкладке представляет стандартное отклонение соответствующей величины. Настройка стандартного отклонения полезна для некоторых практических факторов отслеживания. Например, точность датчика, установленного на башне, падает, если положение башни включает ошибки. В приложении, если вы задаете стандартные отклонения ненулевые значения для платформы с датчиком монтажа, можно наблюдать неточность обнаружений датчика, введенных этими стандартными отклонениями.
![]()
Вы также можете добавить другие платформы в приложение. добавить платформу Plane на холст и установить ее начальное положение как [50, -50, 100]. По умолчанию центр плоскости (красный) находится в ее геометрическом центре.
![]()
Изменить настройку по умолчанию для любого класса (и задать новые классы) можно с помощью редактора Platform Gallery Editor, который можно открыть, щелкнув раскрывающаяся стрела на вкладке PLATFORM.
![]()
Вы не можете редактировать класс текущей используемой платформы. Чтобы удалить платформу, выберите платформу из выпадающего списка и щелкните значок удаления (корзина).
![]()
Чтобы запустить Tracking Scenario Designer, используйте команду:
trackingScenarioDesigner
Добавление Plane платформа на холсте платформы и поместите плоскость на [0, 0, 1000] путем определения ее начального положения через вкладку Initial Pose как:
![]()
Далее добавьте несколько путевых точек к платформе. Щелкните правой кнопкой мыши платформу и выберите Add Waypoints, либо выберите платформу и нажмите Waypoints на панели инструментов TRAJECTORY. Затем последовательно щелкните на холсте, чтобы добавить путевые точки. Чтобы завершить действие, на клавиатуре нажмите Enter.Можно перетащить путевые точки, чтобы изменить траекторию. Заданная траектория представляет траекторию центра платформы, заданную на вкладке Смещения центра платформы.
![]()
На вкладке ТРАЕКТОРИЯ (TRAJECTORY), если для параметров Траектория курса (Trajectory Course) и Ориентация платформы (Platform Orientation) задано значение авто, приложение вычисляет траекторию, подгоняя гладкую кривую, включающую все путевые точки и выравнивая ориентацию платформы по траектории. Если значение Time установлено на Auto, приложение вычисляет длительность траектории (Time) на основе скорости платформы по умолчанию, которая может быть задана через Редактор Галереи Платформ.
![]()
Чтобы отобразить таблицу траекторий ниже, щелкните Таблица траектории (Trajectory Table). Чтобы отобразить график Высота-время (Time-Altitude), щелкните График Высота-время (Time-Altitude Plot).
![]()
После изменения выбора параметра траектории с «Авто» на «Таблица» можно отредактировать соответствующую величину в таблице траектории. После редактирования таблицы наблюдайте изменение траектории.
Можно перетаскивать точки вверх и вниз по высоте на графике Высота-время. После установки значения Time на Table можно перетащить точки вперед и назад во времени.
![]()
Чтобы удалить траекторию, выберите траекторию и нажмите «Удалить траекторию».
![]()
Файл MAT TSD_Platforms был ранее сохранен с сеансом сценария отслеживания. Чтобы запустить приложение и загрузить файл сеанса, используйте команду:
trackingScenarioDesigner('TSD_Platforms.mat')
Приложение откроется и загрузит сценарий. Сценарий содержит две платформы:
Башня высотой 60 метров, расположенная в источник локальной системы координат NED.
Цель, перемещающаяся со скоростью курса 750 м/с вокруг башни.
![]()
Затем установите датчик на верхней части башни, чтобы контролировать ее окружение. В приложении доступны четыре предопределенных класса датчиков.
![]()
Можно также щелкнуть стрела раскрывающегося списка, чтобы отредактировать существующие классы или добавить новые классы датчиков.
В приложении вы выбираете платформу башни, выбираете датчик вращателя и помещаете его на верхнюю часть башни. Нажмите кнопку проекции, чтобы включить вид проекции y-z.
![]()
Датчик по умолчанию расположен в нижней части башни. Чтобы переместить датчик в верхнюю часть башни, измените местоположение монтажа и углы.
![]()
Включите обнаружение на повышении путем выбора Report Elevation. Установите значение поля зрения датчика на Повышение 15 o, чтобы обеспечить широкую область покрытия в повышение. Установите пределы Механического скана для повышения [-15, -5] град., чтобы датчик «посмотрел вверх».
![]()
Чтобы симулировать сценарий слежения и наблюдать обнаружение цели, сгенерированной датчиком, Нажатием кнопки Запуска. (Можно также выбрать «Выполнить без обнаружений».)
![]()
Вы обнаруживаете, что датчик генерирует только одно обнаружение. Можно позволить датчику сканировать быстрее и сгенерировать больше обнаружений, скорректировав скорость его скана с помощью двух параметров:
Частота обновления - определяет количество срезов поля зрения, через которые датчик проходит в секунду.
Поле зрения - определяет ширину каждого поля зрения датчика среза или луча.
В приложении увеличьте частоту обновления датчика до 200 Гц. При азимутальном поле зрения, установленном на 1 o, результирующая скорость скана в азимуте составляет 200 oC, что выше скорости скана по умолчанию Max (75 oC/s). Увеличьте максимальную скорость скана до 300 град/с, чтобы обеспечить высокую скорость скана.
Нажмите запуск, чтобы снова моделировать сценарий. Теперь датчик генерирует несколько наборов обнаружений.
![]()
Можно также экспортировать скрипт сценария, нажав Экспорт. Используя экспортированный скрипт, можно программно изменить сценарий и использовать сгенерированный сценарий для тестирования различных алгоритмов отслеживания. Для получения дополнительной информации об изменении сгенерированного сценария см. пример «Проект и моделирование сценария отслеживания с Tracking Scenario Designer».
Platform Properties - Свойства платформы, включая размерности, положение и RCSЧтобы включить параметры Platform Properties, добавьте по крайней мере одну платформу к сценарию. Затем выберите платформу из параметра Platform Canvas или Platform Properties. Значения параметров на вкладке Platform Properties основаны на выбранной платформе.
| Параметр | Описание |
|---|---|
| Current Platform | Выбранная на данный момент платформа, указанная как список платформ в сценарии. |
| Name | Имя платформы, заданное как строка. |
| Class | Класс платформы, заданный как |
Можно изменить настройки по умолчанию (такие как Speed) четырех классов платформ и добавить новые классы платформ с помощью Platform Gallery Editor. Можно открыть редактор, щелкнув раскрывающаяся стрела на вкладке PLATFORM и выбрав Add/Edit Platform Gallery.
Dimensions - размерности платформыРазмерности платформы, заданные как Length, Width и Height в метрах.
| Параметр | Описание |
|---|---|
| Length (m) | Длина платформы, заданная в виде неотрицательного скаляра в метрах. |
| Width (m) | Ширина платформы, заданная как неотрицательный скаляр в метрах. |
| Height (m) | Высота платформы, заданная в виде неотрицательного скаляра в метрах. |
Можно также задать Platform Center Offset с помощью X, Y и Z смещений. Смещение измеряется от геометрического центра платформы до заданного центра.
| Параметр | Описание |
|---|---|
| X (m) | Смещение в направлении x, заданное как скаляр в метрах. |
| Y (m) | Смещение в направлении y, заданное как скаляр в метрах. |
| Z (m) | Смещение в z-направлении, заданное как скаляр в метрах. |
Initial Pose - Начальное положение и ориентация платформыНачальное положение и ориентация платформы, заданные тремя координатами положения X, Y и Altitude в метрах и тремя углами поворота Roll, Pitch и Yaw в степенях.
| Параметр | Описание |
|---|---|
| X (m) | Начальная координата x центра платформы в систему координат сценария, заданная как скаляр в метрах. |
| Y (m) | Исходная координата y центра платформы в систему координат сценария, заданная как скаляр в метрах. |
| Altitude (m) | Начальная высота центра платформы в сценарной системе координат, заданная как скаляр в метрах. |
| Roll (°) | Угол ориентации платформы вокруг оси X системы координат сценария, заданный как скаляр в степенях. |
| Pitch (°) | Угол ориентации платформы вокруг оси Y системы координат сценария, заданный как скаляр в степенях. |
| Yaw (°) | Угол ориентации платформы вокруг оси Z системы координат сценария, заданный как скаляр в степенях. |
Pose Estimation - Точность оценки положения платформыТочность оценки положения платформы, заданная как стандартные отклонения для трех углов поворота: Roll, Pitch и Yaw, и двух величин поступательного движения: Position и Velocity.
Когда стандартное значение отклонения любой величины движения задано как ненулевое, положение платформы содержит ошибки, соответствующие этой величине движения.
| Параметр | Описание |
|---|---|
| Roll (°) | Стандартное отклонение угла крена платформы в виде скаляра в степенях. |
| Pitch (°) | Стандартное отклонение угла тангажа платформы в виде скаляра в степенях. |
| Yaw (°) | Стандартное отклонение угла рыскания платформы, заданное в виде скаляра в степенях. |
| Position (m) | Стандартное отклонение координат положения платформы в виде скаляра в степенях. |
| Velocity (m) | Стандартное отклонение координат скорости платформы в виде скаляра в степенях. |
Radar Cross Section - Информация о сечении радараИнформация о сечении радара, включая информацию о шаблоне RCS и спецификации RCS Viewer. Можно задать постоянный шаблон RCS в качестве скаляра в dBsm, или можно импортировать информацию RCS через Import Signature окно после выбора вкладки Import RCS.
| Параметр | Описание |
|---|---|
| Constant RCS Pattern | RCS- шаблона, заданная как положительная константа в д Бсм. |
| Import RCS | Импортируйте шаблон RCS через Import Signature окно. |
Можно также задать RCS Viewer, изменив Elevation Cut в степенях и Frequency Cut в Гц.
| Параметр | Описание |
|---|---|
| Elevation Cut | Повышение срез средства просмотра RCS, заданный как скаляр в степени. |
| Frequency Cut | Частотный разрез средства просмотра RCS, заданный как скаляр в Гц. |
Sensor Properties - Свойства датчика, включая установку датчика, настройки сканирования и настройки обнаруженияЧтобы включить параметры Sensor Properties, добавьте хотя бы один датчик к платформе. Затем выберите датчик на вкладке Sensor Canvas или Sensor Properties. Значения параметров на вкладке Sensor Properties основаны на выбранных платформе и датчике.
| Параметр | Описание |
|---|---|
| Current Platform | Текущая платформа, на которой установлен датчик, указывается как список платформ в сценарии. |
| Current Sensor | В настоящее время выбранный датчик, указанный как список датчиков в сценарии. |
| Name | Имя датчика в виде строки. |
| Update Rate | Датчик частоты обновления, заданный как положительная скалярная величина в Гц. |
| Type | Тип датчика, заданный как:
|
Mounting Location & Angles - Расположение и углы установки датчикаРасположение и углы установки датчика на платформе, заданные тремя координатами положения X, Y и Z в метрах и тремя углами поворота Roll, Pitch и Yaw в степенях.
| Параметр | Описание |
|---|---|
| X (m) | x координата датчика на системе координат платформы, заданная в виде скаляра в метрах. |
| Y (m) | y координата датчика на системе координат платформы, заданная в виде скаляра в метрах. |
| Z (m) | z координата датчика на системе координат платформы, заданная в виде скаляра в метрах. |
| Roll (°) | Угол ориентации датчика вокруг оси X системы координат платформы, заданный как скаляр в степенях. |
| Pitch (°) | Угол ориентации датчика вокруг оси Y системы координат платформы, заданный как скаляр в степенях. |
| Yaw (°) | Угол ориентации датчика вокруг оси Z системы координат платформы, заданный как скаляр в степенях. |
Scanning & Field of view - Сканирование и поле зрения датчика
| Параметр | Описание |
|---|---|
| Report Elevation | Включите вывод информации о повышении датчика, заданный как |
| Scan Mode | Режим сканирования датчика, выбранный как |
| Field of View (°) | Поле зрения датчика, заданное как два неотрицательных скаляра, представляющих Azimuth и Elevation в степенях. |
| Mechanical scan limits (°) | Верхний и нижний пределы механического скана, заданные как два скаляра для Azimuth в степенях. Если Report Elevation включено, можно задать пределы скана для Elevation в степенях. Чтобы включить этот параметр, установите Scan Mode равным |
| Electronic scan limits (°) | Верхний и нижний пределы электронного скана, заданные как два скаляра для Azimuth в степенях. Если Report Elevation включено, можно задать пределы скана для Elevation в степенях. Чтобы включить этот параметр, установите Scan Mode равным |
| Max scan rate (°/s) | Максимальная скорость скана, заданная в виде скаляра для Azimuth в степенях в секунду. Если Report Elevation включено, можно задать максимальную скорость скана для Elevation в степенях в секунду. Если заданная скорость скана (Частота обновления * Field of View) больше, чем максимальная скорость скана, скорость скана датчика усекается с максимальной частотой скана. Чтобы включить этот параметр, установите Scan Mode равным |
Detections Settings - Настройки обнаруженияНастройки обнаружения датчика, заданные с помощью вероятности обнаружения, скорости ложного предупреждения, эталонной области значений и эталонного RCS.
| Параметр | Описание |
|---|---|
| Detection Probability | Вероятность успешного обнаружения датчиком цели в виде скаляра в [0,1]. Эта величина определяет вероятность обнаружения цели с радиолокационным сечением, большим, чем Reference RCS, и в Reference Range датчика. |
| False Alarm Rate | Вероятность ложного обнаружения датчика в каждой камере разрешения датчика, заданная как скаляр в [1e-7,1e-3]. |
| Reference Range (m) | Ссылки области значений для данного Detection Probability и данного Reference RCS, заданные как положительная скалярная величина в метрах. |
| Reference RCS (dBsm) | Базовое радиолокационное сечение (RCS) для данного Detection Probability и данного Reference Range, заданное в виде скаляра в д Бсм. |
Advanced Settings - Дополнительные настройкиДополнительные настройки датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Max Number of Detections | Максимальное количество обнаружений, сообщенных датчиком, заданное в виде положительного целого числа. |
| Report False Alarm | Включите датчик для моделирования и сообщения о ложных предупреждениях, заданных как |
| Report Range Rate | Включите радар для измерения и сообщения о скоростях области значений, заданных как |
| Model Target Occlusion | Включите окклюзию объектов из расширенных объектов, заданную как |
| Model Range Ambiguity | Включите неоднозначности области значений, заданные как |
| Model Range Rate Ambiguity | Включите неоднозначности уровня области значений как Чтобы включить этот параметр, установите Report Range Rate равным |
| Max Unambiguous Range (m) | Максимальная однозначная область значений, заданное как положительная скалярная величина. Максимальная однозначная область значений определяет максимальную область значений, для которой радар может однозначно разрешить область значений цели. |
| Max Unambiguous Radial Speed (m/s) | Максимальная однозначная радиальная скорость, заданная как положительная скалярная величина. Радиальная скорость является величиной целевой скорости области значений. Максимальная однозначная радиальная скорость задает радиальную скорость, для которой радар может однозначно разрешить скорость области значений цели. Чтобы включить этот параметр, установите Report Range Rate равным |
Accuracy & Noise - Настройки точности и шумаТочность и шумовая настройка датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Azimuth (°) | Разрешение азимута и смещение, заданные как два неотрицательных скаляра:
|
| Elevation (°) | Разрешение по повышению и смещение, заданные как два неотрицательных скаляра:
Чтобы включить этот параметр, включите Report Elevation. |
| Range (m) | Разрешение в области значений и смещение, заданные как два неотрицательных скаляра:
|
| Range Rate (m/s) | Разрешение и смещение уровня области значений, заданные как два неотрицательных скаляра:
|
| Add noise to measurements | Добавьте шум измерения в обнаружениях, заданный как |
TRAJECTORY - Настройки траекторииЧтобы отредактировать траекторию и управлять генерацией траектории, используйте настройки траектории.

Щелкните Waypoints, чтобы добавить путевые точки к выбранной платформе.
Щелкните Delete Trajectory, чтобы удалить существующую траекторию.
Щелкните Trajectory Table, чтобы отобразить таблицу траекторий.
Щелкните Time-Altitude plot, чтобы отобразить график зависимости времени от высоты.
Можно также принять решение автоматически сгенерировать траекторию путевой точки или вручную ввести путевые точки путем изменения выбора параметров PATH AND ORIENTATION и SPEED.
| Параметр | Выбор |
|---|---|
| Trajectory Course |
|
| Platform Orientation |
|
| Time |
|
| Ground speed |
|
| Climb Rate |
|
Trajectory Table - Информация о траекторииИнформация о траектории для каждой путевой точки, заданная как таблица скаляров. При вставке путевых точек на холст платформы таблица генерируется автоматически. Щелкните Trajectory Table под вкладкой Trajectory, чтобы отобразить таблицу.

После изменения значений параметров в таблице, траектория платформы изменяется соответственно на холсте. Таблица включает эти параметры траектории.
| Параметр | Описание |
|---|---|
| Times (s) | Время, в которое платформа посещает путевую точку, заданное как скаляр в секундах. |
| X (m) | координата x путевой точки в навигационной системе координат сценария. |
| Y (m) | y координата путевой точки в навигационной системе координат сценария. |
| Altitude (m) | Высота точки пути платформы в навигационной системе координат сценария. |
| Course (°) | Направление движения на плоскости x-y, заданное как измерение угла от направления x. |
| Ground speed (m/s) | Величина спроецированной скорости на плоскости x-y, заданная в виде скаляра в метрах. |
| Climb Rate (m/s) | Скорость подъема путевой точки, которая является проекцией скорости платформы в направлении z. |
| Roll (°) | Угол ориентации платформы вокруг оси X системы координат сценария, в степенях, задается как скаляр. |
| Pitch (°) | Угол ориентации платформы вокруг оси Y системы координат сценария, в степенях, задается как скаляр. |
| Yaw (°) | Угол ориентации платформы вокруг оси Z системы координат сценария, в степенях, задается как скаляр. |
Приложения используют NED-кадр в качестве координатной системы координат по умолчанию, в которой платформа с положительной высотой имеет отрицательную координату z.
Можно отменить (нажать Ctrl+Z) и повторно (нажать Ctrl+Y) изменения, которые вы делаете в сценарии и холстах датчика. Для примера можно использовать эти горячие клавиши для удаления недавно расположенного центра дороги или повторного перемещения радарного датчика.
Можно использовать панель Space на клавиатуре, чтобы сбросить холст платформы в представление, содержащее все платформы и траектории.
Можно использовать клавиши Enter и Esc на клавиатуре, чтобы принять и отменить путевую точку, соответственно.
