Мультисенсорный, многообъектный PHD-трекер
Sensor Fusion and Tracking Toolbox/Мультиобъектные алгоритмы отслеживания
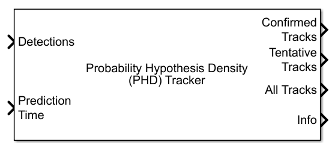
Блок Probability Hypothesis Density (PHD) Tracker создает и управляет треками стационарных и движущихся объектов в мультисенсорном окружении. Трекер использует фильтр плотности гипотезы множественных целевых вероятностей, чтобы оценить состояния точечных целей и расширенных объектов. PHD представлен взвешенным суммированием функций плотности вероятностей, и пики в PHD извлечены, чтобы представлять возможные цели. Смотрите Алгоритмы для получения дополнительной информации.
Detections - Список обнаруженийСписок обнаружений, заданный как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Область | Описание | Напечатать |
|---|---|---|
NumDetections | Количество обнаружений | Целое число. |
Detections | Обнаружения объектов | Массив структур обнаружения объектов. Первый NumDetections из этих обнаружений являются фактическими обнаружениями. |
Поля Detections являются:
| Область | Описание | Напечатать |
|---|---|---|
Time | Время измерения | single или double |
Measurement | Измерения объекта | single или double |
MeasurementNoise | Матрица ковариации шума измерения | single или double |
SensorIndex | Уникальный идентификатор датчика | single или double |
ObjectClassID | Идентификатор классификации объектов | single или double |
MeasurementParameters | Параметры, используемые функциями инициализации фильтров отслеживания | Шина Simulink |
ObjectAttributes | Трекеру передана дополнительная информация | Шина Simulink |
См. objectDetection для более подробного объяснения этих полей.
Примечание
Структура обнаружения объектов содержит Time поле. Временной тег каждого обнаружения объектов должен быть меньше или равен времени текущего вызова блока. Временной тег также должен быть больше времени обновления, заданного в предыдущем вызове блока.
Prediction Time - Отследите время обновленияОтследите время обновления, заданное как действительный скаляр в секундах. Трекер обновляет все треки к этому времени. Время обновления должно увеличиваться с каждым вызовом блока. Модули указаны в секундах. Время обновления должно быть как минимум таким же большим, как и самое большое Time задается в Detections входном порте.
Если этот порт не включен, время обновления определяется временем симуляции, управляемым Simulink.
Чтобы включить этот порт, на вкладке Port Setting задайте Prediction time source Input port.
Sensor Configurations - Строения датчиков слеженияСтроения датчиков слежения, заданные как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Область | Описание | Напечатать |
|---|---|---|
NumConfigurations | Количество строений датчика | Целое число. |
Configurations | Строения датчика | Массив структур строения датчика. Первый NumConfigurations из этих строений являются фактическими строениями. Допустимые имена и определения полей совпадают с соответствующими свойствами trackingSensorConfiguration объект. |
Чтобы включить этот порт, на вкладке Tracker выберите параметр Update sensor configurations with time.
State Parameters - Отследите параметры состоянияОтслеживайте параметры состояния, заданные как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Область | Описание |
|---|---|
NumParameters | Количество параметров, не являющихся параметрами состояния по умолчанию, заданное в виде неотрицательного целого числа |
Parameters | Массив структур параметров состояния |
Блок использует значение Parameters поле для StateParameters поле сгенерированных дорожек. Можно использовать эти параметры, чтобы задать систему координат, в которой трек сообщается, или другие желательные атрибуты сгенерированных треков.
Например, можно использовать следующую структуру, чтобы задать прямоугольную систему координат, начальное положение которой находится в [10 10 0] метров, начальная скорость которых [2 -2 0] метров в секунду относительно системы координат сценария.
| Имя поля | Значение |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Чтобы включить этот порт, на вкладке Tracker Configuration выберите параметр Update track state parameters with time.
Confirmed Tracks - Подтвержденные дорожкиПодтвержденные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Область | Описание |
|---|---|
NumTracks | Количество дорожек. |
Tracks | Массив структур дорожки длиной, заданной параметром Maximum number of tracks. Только первый NumTracks из них являются фактическими треками. |
Поля структуры дорожки показаны в Track Structure.
Tentative Tracks - Ориентировочные дорожкиОриентировочные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Дорожка является ориентировочной, прежде чем она будет подтверждена. Выходы этого порта имеют ту же форму, что и выходы порта Confirmed Tracks.
Чтобы включить этот порт, на вкладке Port Setting, выберите Enable tentative tracks output.
All Tracks - Подтвержденные и ориентировочные трекиОбъединенный список подтвержденных и ориентировочных дорожек, возвращенных как шина Simulink, содержащая структуру MATLAB. Выходы этого порта имеют ту же форму, что и выходы порта Confirmed Tracks.
Чтобы включить этот порт, на вкладке Port Setting, выберите Enable all tracks output.
Info - Дополнительная информация для анализа обновлений трековДополнительная информация для анализа обновлений трека, возвращенная как шина Simulink, содержащая структуру MATLAB.
В этой таблице показаны поля информационной структуры:
| Область | Описание |
CorrectionOrder | Порядок, в котором датчики используются для коррекции оценки состояния, возвращается как вектор-строка |
TrackIDsAtStepBeginning | Отслеживайте идентификаторы, когда шаг начался. |
DeletedTrackIDs | Идентификаторы треков, удаленных во время шага. |
TrackIDsAtStepEnd | Отслеживайте идентификаторы, когда шаг закончен. |
SensorAnalysisInfo | Массив ячеек информации анализа датчика. |
The SensorAnalysisInfo поле может включать в себя несколько информационных отчетов о датчике. Каждый отчет представляет собой структуру, содержащую следующие поля:
| Область | Описание |
SensorIndex | Индекс датчика. |
DetectionCells | Обнаружение камер, возвращенное как логическая матрица. Каждый столбец матрицы обозначает камеру обнаружения. В каждом столбце, если i элемент равен 1, то i-й обнаружение принадлежит камере обнаружения, обозначенной этим столбцом. |
DetectionLikelihoods | Правдоподобия ассоциации между компонентами в функции плотности и камерах обнаружения, возвращенная как матрица N -by P. N - количество компонентов в функции плотности, а P - количество камер обнаружения. |
IsBirthCells | Указывает, указаны ли камеры обнаружения в |
NumPartitions | Количество разделов. |
DetectionProbability | Вероятность обнаружения датчиком существующих дорожек, возвращаемых как вектор-строка N 1 байт, где N - количество компонентов в функции плотности. |
LabelsBeforeCorrection | Метки компонентов в функции плотности перед коррекцией возвращаются как вектор-строка 1-by- M b. M b - количество компонентов, поддерживаемых в трекере перед коррекцией. Каждый элемент вектора является |
LabelsAfterCorrection | Метки компонентов в функции плотности после коррекции, возвращенные как 1-байт- M вектор-строка. M a - количество компонентов, поддерживаемых в трекере после коррекции. Каждый элемент вектора является |
WeightsBeforeCorrection | Веса компонентов в функции плотности перед коррекцией, возвращенные как вектор-строка 1-by M b. M b - количество компонентов, поддерживаемых в трекере перед коррекцией. Каждый элемент вектора является весом соответствующего компонента |
WeightsAfterCorrection | Веса компонентов в функции плотности после коррекции, возвращенные как 1-by- M вектор-строка. M a - количество компонентов, поддерживаемых в трекере после коррекции. Каждый элемент вектора является весом соответствующего компонента |
Чтобы включить этот порт, на вкладке Port Setting, выберите Enable information output.
Tracker identifier - Уникальный идентификатор трекера0 (по умолчанию) | неотрицательное целое числоУникальный идентификатор трекера, заданный как неотрицательное целое число. Этот параметр передается как SourceIndex в выходах трекера и различает треки, которые поступают от разных трекеров в системе с несколькими трекерами. Вы должны задать это свойство как положительное целое число, чтобы использовать выходы дорожки в качестве входов для блока Track-To-Track Fuser.
Пример: 1
Detection partition function - Функция для разделения обнаружений на камеры обнаружения@partitionDetections (по умолчанию) | указатель на функцию | вектор символовФункция для разделения обнаружений на камеры обнаружения, заданная как указатель на функцию или как вектор символов. Когда каждый датчик может сообщить о более чем одном обнаружении на объект, вы должны использовать функцию разбиения. Функция разбиения сообщает обо всех возможных разбиениях обнаружений с датчика. В каждом разделе обнаружения разделяются на взаимоисключающие камеры обнаружения, принимая, что каждая камера обнаружения принадлежит одному расширенному объекту.
Вы также можете задать свою собственную функцию секционирования обнаружений. Для руководства при написании этой функции, можно изучить детали функции разбиения по умолчанию, partitionDetections, с использованием type команда:
type partitionDetectionsПример:
@myfunction или 'myfunction'
Detection selection threshold - Порог выбора обнаружений для инициализации компонента25 (по умолчанию) | реальная положительная скалярная величинаПороговое значение выбора обнаружений для инициализации компонента, заданное как положительная скалярная величина. Во время коррекции трекер вычисляет вероятность ассоциации между существующими треками и камерами обнаружения. Если вероятность ассоциации (заданная отрицательной логарифмической правдоподобностью) камеры обнаружения со всеми существующими дорожками выше порога (что означает, что камера обнаружения имеет низкую вероятность связи с существующими дорожками), камера обнаружения используется для инициализации новых компонентов адаптивной плотности рождения.
Пример: 18.1
Типы данных: single | double
Maximum number of sensors - Максимальное количество датчиков20 (по умолчанию) | положительное целое числоМаксимальное количество датчиков, которые могут быть подключены к трекеру, заданное в виде положительного целого числа. MaxNumSensors должно быть больше или равно наибольшему значению SensorIndex найдено во всех обнаружениях, используемых для обновления блока.
Типы данных: single | double
Maximum number of tracks - Максимальное количество дорожек1000 (по умолчанию) | положительное целое числоМаксимальное количество треков, которые может поддерживать трекер, задается как положительное целое число.
Типы данных: single | double
Sensor configurations - Строения датчиков слеженияstruct('SensorIndex',1,'IsValidTime',true) (по умолчанию) | структуру | массив структурСтроение датчиков слежения, заданная как структура или массив структур. Этот параметр предоставляет информацию о строении датчика слежения, такие как пределы обнаружения датчика и разрешение датчика, трекеру. Допустимые имена полей каждой структуры совпадают с именами свойства trackingSensorConfiguration объект. Если вы задаете MaxDetsPerObject поле структуры для 1, трекер создает только один раздел, так что самое большее одно обнаружение может быть назначено каждому целевому объекту.
Вы можете обновить строение через Sensor configurations входной порт, выбрав параметр Update sensor configurations with time.
Update sensor configurations with time - Обновление строений датчика по времениoff (по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для отслеживания строений датчика через Sensor Configurations входной порт.
Track state parameters - Параметры системы координат состояния путиПараметры опорной системы координат состояния дорожки, заданные как структура или массив структур. Блок передает значение этого параметра StateParameters поле сгенерированных дорожек. Можно использовать эти параметры, чтобы задать систему координат, в которой трек сообщается, или другие желательные атрибуты сгенерированных треков.
Например, можно использовать следующую структуру, чтобы задать прямоугольную систему координат, начальное положение которой находится в [10 10 0] метров, начальная скорость которых [2 -2 0] метров в секунду относительно системы координат сценария.
| Имя поля | Значение |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Можно обновить параметры состояния дорожки через State Parameters входной порт, выбрав параметр Update track state parameters with time.
Типы данных: struct
Update track state parameters with time - Обновление параметров состояния отслеживания по времениoff (по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для параметров состояния дорожки через State Parameters входной порт.
Simulate using - Тип выполняемой симуляцииInterpreted Execution (по умолчанию) | Code GenerationВыберите тип симуляции для выполнения из следующих опций:
Interpreted execution - Симулируйте модель с помощью интерпретатора MATLAB. Эта опция сокращает время запуска. В Interpreted execution mode, можно отлаживать исходный код блока.
Code generation - Симулируйте модель с помощью сгенерированного кода C. При первом запуске симуляции Simulink генерирует код С для блока. Код С повторно используется для последующих симуляций, пока модель не меняется. Эта опция требует дополнительного времени запуска.
Birth rate of new targets - Коэффициент рождаемости новых целевых показателей по плотности1e-3 (по умолчанию) | положительный действительный скалярРождаемость новых целей в плотности, заданная как положительный реальный скаляр. Коэффициент рождаемости указывает ожидаемое количество целевых показателей, добавленных в плотности в единицу времени. Плотность рождения создается при помощи FilterInitializationFcn строения датчика, используемой с трекером. В целом трекер добавляет компоненты в функцию плотности двумя способами:
Прогнозирующая плотность рождения - эта плотность инициализируется FilterInitializationFcn функция при вызове без входов.
Адаптивная плотность рождения - Эта плотность инициализируется FilterInitializationFcn функция при вызове с входами обнаружения. Трекер выбирает обнаружения на основе их логарифмической правдоподобности связи с текущими оценками целей.
Значение для параметра Birth rate of new targets представляет суммирование как прогнозирующей плотности рождения, так и адаптивной плотности рождения для каждого временного шага.
Пример: 0.01
Типы данных: single | double
Death rate of components - Смертность компонентов в плотности1e-6 (по умолчанию) | положительный действительный скалярСмертность компонентов в плотности, заданная как положительный реальный скаляр. Смертность указывает скорость, с которой компонент исчезает в плотности после одного временного шага. Это уравнение иллюстрирует, как смертность (P d) связана с вероятностью выживания (P s) компонента между последовательными временными шагами:
где Δ T является временным шагом.
Пример: 1e-4
Типы данных: single | double
Threshold for initializing tentative tracks - Порог для инициализации предварительной дорожки0.5 (по умолчанию) | положительный действительный скалярПорог для инициализации ориентировочной дорожки, заданное как положительный действительный скаляр. Если вес компонента выше порога, компонент помечается как 'Tentative' отследить и задать TrackID.
Пример: 0.45
Типы данных: single | double
Threshold for track confirmation - Порог для подтверждения трека0.8 (по умолчанию) | положительный действительный скалярПорог для подтверждения дорожки, заданное как положительный действительный скаляр. В PHD-трекере трек может иметь несколько компонентов, разделяющих одну и ту же TrackID. Если суммирование веса компонентов предварительной дорожки выше порога подтверждения, статус дорожки помечается как 'Confirmed'.
Пример: 0.85
Типы данных: single | double
Threshold for track deletion - Порог для удаления компонента1e-3 (по умолчанию) | положительный действительный скалярПорог для удаления компонента, заданное как положительный действительный скаляр. В трекере PHD, если вес компонента ниже порога удаления, компонент удаляется.
Пример: 0.01
Типы данных: single | double
Threshold for components merging - Порог для объединения компонентов25 (по умолчанию) | положительный действительный скаляр Порог для объединения компонентов, заданное как положительный действительный скаляр. В трекере PHD, если расстояние Kullback-Leibler между компонентами с той же TrackID меньше порога слияния, затем эти компоненты объединяются в один компонент. Объединенный вес нового компонента равен суммированию весов предварительно объединенных компонентов. Более того, если объединенный вес выше первого порога, заданного в параметре Thresholds for label management, объединенный вес обрезается до первого порога. Обратите внимание, что компоненты с TrackID от 0 могут также быть объединены друг с другом.
Пример: 30
Типы данных: single | double
Thresholds for label management - Пороги для управления метками[1.1 1 0.8] (по умолчанию) | вектор 1 на 3 положительных значенийПороги маркировки, заданные как вектор 1 на 3 уменьшения положительных значений, [C 1, C 2, C 3]. Исходя из этого параметра, трекер управляет компонентами плотности, используя следующие правила:
Вес любого компонента, который выше первого порога C 1, уменьшается до C 1.
Для всех компонентов с одинаковыми TrackID, если наибольший вес среди этих компонентов больше C 2, то компонент с наибольшим весом сохраняется, чтобы сохранить TrackID, в то время как все другие компоненты удаляются.
Для всех компонентов с одинаковыми TrackID, если отношение наибольшего веса к массовому суммированию всех этих компонентов больше C 3, то компонент с наибольшим весом сохраняется, чтобы сохранить TrackID, в то время как все другие компоненты удаляются.
Если ни условие 2, ни условие 3 не удовлетворены, то компонент с наибольшим весом сохраняет TrackID, в то время как для меток всех других компонентов задано значение 0. Когда это происходит, это означает, что некоторые компоненты могут представлять другие объекты. Этот процесс сохраняет возможность повторного извлечения этих незарезервированных компонентов в будущем.
Prediction time source - Источник времени предсказанияAuto (по умолчанию) | Input portИсточник для времени предсказания, заданный как Input port или Auto. Выберите Input port для ввода времени обновления с помощью Prediction Time входного порта. В противном случае часы симуляции, управляемые Simulink, определяют время обновления.
Enable tentative tracks output - Включите выходной порт для ориентировочных дорожекoff (по умолчанию) | onВыберите этот параметр, чтобы включить выход предварительных дорожек через Tentative Tracks выходной порт.
Enable all tracks output - Включите выходной порт для всех трековoff (по умолчанию) | onВыберите этот параметр, чтобы включить выход всех дорожек через All Tracks выходной порт.
Enable information output - Включите выходной порт для информации анализаoff (по умолчанию) | onВыберите этот параметр, чтобы включить выход информации анализа через Info выходной порт.
Source of output bus name - Источник имени выходной магистральной шиныAuto (по умолчанию) | PropertyИсточник выхода магистральной шины, заданный как:
Auto - Блок автоматически создает выход шины трека.
Property - Задайте имя выходной шины дорожки с помощью параметра Specify an output bus name.
Source of output info bus name - Имя выходной информационной шиныAuto (по умолчанию) | PropertyИсточник имени информационной шины выхода, заданный как:
Auto - Блок автоматически создает имя шины выхода информации.
Property - Задайте имя выходной информационной шины при помощи параметра Specify an output info bus name.
Чтобы включить этот параметр, на вкладке Port Setting, выберите Enable information output.
PHD-трекер использует итеративно-корректорный подход, чтобы обновить плотность гипотезы вероятности путем обработки информации обнаружения от нескольких датчиков последовательно. Рабочий процесс трекера следует следующим шагам:
Трекер сортирует датчики в соответствии со временем сообщения об обнаружении и определяет порядок коррекции соответственно.
Трекер рассматривает две отдельные плотности: плотность тока и плотность рождения. Плотность тока является плотностью целей, распространенных с предыдущего временного шага. Плотность рождений - это плотность целей, которые, как ожидается, родятся в текущем временном шаге.
Для каждого датчика:
Трекер предсказывает плотность тока до отметки времени датчика, используя вероятность выживания, рассчитанную из смертности и истекшего времени от последнего предсказания.
Трекер добавляет новые компоненты к плотности рождения, используя FilterInitializationFcn без входов. Это соответствует прогнозирующей плотности рождения.
Трекер создает разделы обнаружений от датчика тока с помощью функции разделения обнаружения. Каждый раздел является возможной сегментацией обнаружений в камеры обнаружения для каждого объекта. Если структура строения датчика задает MaxNumDetsPerObject как 1, трекер генерирует только один раздел, в котором каждое обнаружение является автономной камерой.
Каждая камера обнаружения оценивается по плотности тока, и значение логарифмической правдоподобности вычисляется для каждой камеры обнаружения.
Используя значения логарифмической правдоподобности, трекер вычисляет вероятность каждого раздела.
Трекер корректирует плотность тока, используя каждую камеру обнаружения.
Для камер обнаружения с высокой отрицательной логарифмической правдоподобностью (больше порога назначения), трекер добавляет новые компоненты к плотности рождения, используя FilterInitializationFcn параметр. Это соответствует адаптивной плотности рождения.
После коррекции плотности тока с каждым датчиком трекер добавляет плотность рождения к плотности тока. Трекер гарантирует, что количество возможных целей в плотности рождения равно BirthRate × dT, где dT является временным шагом.
Плотность тока затем прогнозируется до текущего времени обновления.
Плотность гипотезы вероятностей (PHD) является функцией, заданной в пространстве состояний системы слежения, и ее значение в состоянии определяется как ожидаемое количество целей на модуль объема пространства состояний. PHD обычно аппроксимируется смесью компонентов, и каждый компонент соответствует оценке состояния. Обычно используемыми приближениями PHD являются смесь Гауссова, смесь SMC, смесь GGIW и смесь GIW.
Чтобы понять PHD, возьмите Гауссову смесь как пример. Гауссова смесь может быть представлена
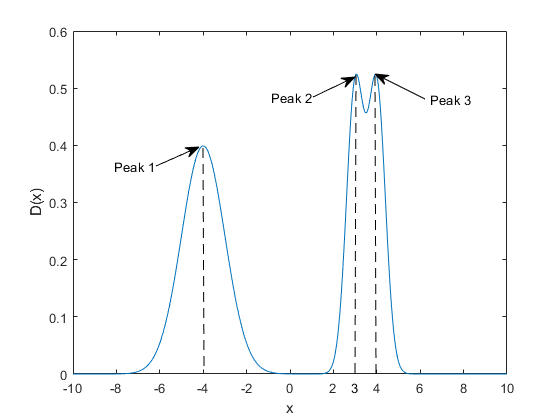
где M - общее количество компонентов, N (x | m i, P i) является нормальным распределением со средним m i и ковариационным P i, и w i - вес i-го компонента. Вес w i обозначает число, которое может быть дробным, целей, представленных i-м компонентом. Интегрирование D (x) в пространственно-пространственную область приводит к ожидаемому количеству целей в этой области. Интегрирование D (x) по всему пространству состояний приводит к общему ожидаемому числу целей (∑ w i), поскольку интегрирование нормального распределения по всему пространству состояний равняется 1. x -координаты peaks (локальные максимумы) D (x) представляют наиболее вероятные состояния целей.
Например, следующий рисунок иллюстрирует функцию PHD, заданную D (x) = N (x | − 4,2) + 0,5 N (x | 3,0,4) + 0,5 N (x | 4,0,4). Массовое суммирование этих компонентов составляет 2, что означает, что, вероятно, существуют две цели. Из peaks D (x) возможные положения этих целей на x = − 4, x = 3 и x = 4. Заметьте, что последние два компонента очень близки друг к другу, что означает, что эти два компонента могут быть приписаны одному объекту.
Полями структуры дорожки являются:
| Область | Определение |
|---|---|
SourceIndex | Уникальный исходный индекс, используемый для различения источников отслеживания в среде нескольких трекеров. |
TrackID | Уникальный идентификатор дорожки, используемый для различения нескольких дорожек. |
BranchID | Уникальный идентификатор ветви дорожки, используемый для различения нескольких ветвей дорожки. |
UpdateTime | Время обновления дорожки. Модули указаны в секундах. |
Age | Количество раз, когда трек выживал. |
State | Значение вектора состояния во время обновления. |
StateCovariance | Ковариационная матрица неопределенности. |
TrackLogic | Тип логики подтверждения и удаления, возвращенный следующим 'History' или 'Score'. |
TrackLogicState | Текущее состояние типа логики дорожки. На основе типа логики
|
IsConfirmed | Статус подтверждения. Это поле true если дорожка подтверждена как действительная цель. |
IsCoasted | Состояние скручивания. Это поле true если дорожка обновляется без нового обнаружения. |
IsSelfReported | Укажите, сообщает ли трек трекер. Это поле используется в среде слияния треков. Возвращается следующим |
ObjectClassID | Целое значение, представляющее классификацию объектов. Значение 0 представляет неизвестную классификацию. Ненулевые классификации применяются только к подтвержденным трекам. |
ObjectAttributes | Дополнительная информация о дорожке. |
[1] Granstorm, K., C. Lundquiest, and O. Orguner. Расширенное отслеживание цели с использованием PHD-фильтра Гауссовой смеси. Транзакции IEEE по аэрокосмическим и электронным системам. Том 48, № 4, 2012, стр. 3268-3286.
[2] Granstorm, K., and O. Orguner ". PHD-фильтр для слежения за несколькими расширенными целями с помощью случайных матриц ". Транзакции IEEE по обработке сигналов. Том 60, № 11, 2012, стр. 5657-5671.
[3] Granstorm, K., and A. Natale, P. Braca, G. Ludeno, and F. Serafino. «Гамма Гауссов обратный Wishart гипотезы вероятности плотности для расширенного отслеживания цели с использованием морских радиолокационных данных X-диапазона». Транзакции IEEE по геологии и дистанционному зондированию. Том 53, № 12, 2015, стр. 6617-6631.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
