Отслеживание важно для руководства, навигации и управления автономными системами. Система слежения оценивает цели (количество целей и их состояния) и оценивает ситуационное окружение в интересующей области, принимая обнаружения (кинематические параметры и атрибуты) и отслеживая эти цели со временем. Самая простая система слежения является одной системой сопровождения целей (STT) в безоблачном окружении, которая принимает одну цель только в интересующей области. STT не требует назначения данных или ассоциации, потому что обнаружение автономной цели может быть непосредственно подано в оценщик или фильтр, используемый для оценки состояния цели.
Современные системы слежения обычно включают в себя несколько систем сопровождения целей (MTT), в которых один или несколько датчиков генерируют несколько обнаружений от нескольких целей, и одна или несколько дорожек используются для оценки состояний этих целей. MTT должен назначить обнаружение трекам, прежде чем обнаружение может использоваться для обновления треков. Задача назначения MTT сложна из-за нескольких факторов:
Цель или распределение обнаружения - если цели распределены редко, то связать цель с ее соответствующим обнаружением относительно легко. Однако, если цели или обнаружения распределены плотно, назначение становится неоднозначным, потому что назначение цели обнаружению или близлежащему обнаружению редко делает какие-либо различия в стоимости.
Вероятность обнаружения (P d) датчика - P d описывает вероятность того, что цель обнаруживается датчиком, если цель находится в поле зрения датчика. Если P d датчика маленькая, то истинная цель может не сгенерировать никакого обнаружения во время скана датчика. В результате дорожка, представленная истинной целью, может красть обнаружения из других дорожек.
Разрешение датчика - Разрешение датчика определяет способность датчика различать обнаружения от двух целей. Если разрешение датчика низкое, то две близкие цели могут привести только к одному обнаружению. Это нарушает общее предположение, что каждое обнаружение может быть назначено только одной дорожке, и приводит к неразрешимым конфликтам назначения между дорожками.
Коэффициент загромождения или ложного предупреждения датчика - ложные предупреждения вводят дополнительные возможные назначения и, следовательно, увеличивают сложность назначения данных.
Количество целей и обнаружений - число возможных назначений увеличивается экспоненциально по мере увеличения количества целей и обнаружений. Поэтому для получения оптимального назначения требуется больше расчетов.
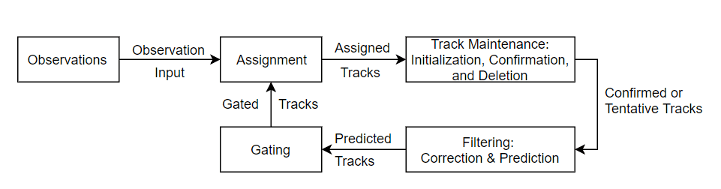
Рисунок дает структурное представление функциональных элементов массива простой рекурсивной системы MTT [1]. В реальных приложениях функции этих элементов могут значительно перекрываться. Однако это представление обеспечивает удобное разбиение, чтобы ввести типичные функции в системе MTT.
Чтобы интерпретировать эту схему, предположим, что трекер сохранил подтвержденные или ориентировочные дорожки от предыдущего скана. Теперь система рассматривает вопрос об обновлении треков на основе каких-либо новых обнаружений, полученных с датчиков. Для назначения обнаружений соответствующим трекам:
Внутренний фильтр (такой как фильтр Калмана) предсказывает подтвержденные или ориентировочные дорожки от предыдущего шага до текущего шага.
Трекер использует предсказанную оценку и ковариацию, чтобы сформировать ворота валидации вокруг предсказанной дорожки.
Обнаружения, попадающие в ворота дорожки, рассматриваются как кандидаты для назначения дорожке.
Алгоритм назначения (на основе определенного трекера, такого как GNN или TOMHT) определяет ассоциацию track-to-detection.
На основе назначения трекер выполняет обслуживание трека, включая инициализацию, подтверждение и удаление:
Неназначенные наблюдения могут инициировать новые предварительные дорожки.
Предварительная дорожка становится подтвержденной, если качество дорожки удовлетворяет критериям подтверждения.
Низкокачественные дорожки удаляются на основе критериев удаления.
Новый набор дорожек (предварительный и подтвержденный) прогнозируется до следующего шага скана, чтобы сформировать ворота валидации.
Обнаружение - это коллективный термин, используемый для ссылки на все наблюдаемые или измеренные величины, включенные в выход отчета (см. objectDetection для примера) с датчика. В целом наблюдение может содержать измеренные кинематические величины (такие как диапазон, линия зрения и скорость области значений) и измеренные атрибуты (такие как тип цели, идентификационный номер и форма). Обнаружение должно также содержать время, в которое получаются измерения.
Для отслеживания точечной цели обнаружения, полученные от одного скана датчика, могут содержать самое большее одно наблюдение от каждой цели. Это предположение значительно упрощает задачу присвоения. Один датчик может сгенерировать нулевые обнаружения для цели в пределах ее поля зрения, потому что вероятность обнаружения, P d, каждого датчика обычно меньше 1. Кроме того, каждый датчик может генерировать обнаружения ложных предупреждений, которые не соответствуют истинным целям .
Датчики высокого разрешения могут генерировать несколько обнаружений на цель, что требует разбиения обнаружений на одно репрезентативное обнаружение перед подачей на основанные на назначении трекеры (такие как trackerGNN, trackerJPDA, и trackerTOMHT). Для получения дополнительной информации смотрите Расширенное Отслеживание Объектов Дорожных Транспортных Средств с Радаром и Камерой.
Для получения дополнительной информации о стробировании и присвоении смотрите Введение в методы назначения в системах отслеживания, которое обеспечивает комплексное внедрение методов присвоения. В этом разделе рассматриваются только основы стробирования и назначения, используемые в трех основанных на назначении трекерах, trackerGNN, trackerJPDA, и trackerTOMHT.
Gating является механизмом скрининга, используемым для определения, какие обнаружения являются допустимыми кандидатами для обновления существующих треков. Цель стробирования состоит в том, чтобы уменьшить ненужные расчеты при назначении track-to-detection. Логический элемент валидации предсказанной дорожки формируется с использованием предсказанного состояния и связанной с ним ковариации, так что обнаружения с высокой вероятностью ассоциации попадают в логический элемент валидации дорожки. Для присвоения дорожки рассматриваются только обнаружения внутри затвора дорожки.
После стробирования функция назначения определяет, какие назначения track-to-detection выполнять. Три метода назначения используются с тремя трекерами в тулбоксе:
trackerGNN - Глобальная ближайшая ассоциация данных. Основываясь на теории правдоподобия, цель метода GNN состоит в том, чтобы минимизировать общую функцию расстояния, которая рассматривает все назначения track-to-detection.
trackerJPDA - Совместная ассоциация данных вероятностей. Метод JPDA применяет мягкое назначение, таким образом, что обнаружения в элементе валидации дорожки могут все вносить взвешенные вклады в дорожку на основе их вероятности ассоциации.
trackerTOMHT - Отслеживание нескольких гипотез, ориентированных на трек. В отличие от GNN и JPDA, MHT является отложенным подходом к принятию решений, который позволяет отложить сложные ситуации ассоциации данных до получения дополнительной информации.
Решение какого трекера использовать зависит от типа доступных целей и вычислительных ресурсов:
Алгоритм GNN является самым простым в использовании. Он имеет низкие вычислительные затраты и может привести к адекватной эффективности для отслеживания плохо распределенных целей.
Алгоритм JPDA, который требует больших вычислительных затрат, также применим для широко разнесенных целей. Обычно он работает лучше в загроможденном окружении, чем GNN.
Трекер TOMHT, который требует больших вычислительных ресурсов, обычно приводит к лучшей эффективности среди всех трех трекеров, особенно для плотно распределенных целей.
Для получения дополнительной информации смотрите пример Отслеживать тесно расположенные цели под неоднозначностью для сравнения этих трех трекеров.
Техническое обслуживание трека относится к функции инициирования, подтверждения и удаления трека.
Инициация трека. Если обнаружение не назначено существующей дорожке, может потребоваться создать новую дорожку:
Подход GNN запускает новые предварительные дорожки на наблюдениях, которые не назначены существующим дорожкам.
Подход JPDA запускает новые предварительные дорожки на наблюдениях с вероятностью присвоения ниже заданного порога.
Подход MHT запускает новые предварительные дорожки на наблюдениях, чьи расстояния до существующих дорожек больше заданного порога. Трекер использует последующие данные, чтобы определить, какие из этих вновь инициированных треков действительны.
Отследите подтверждение. После формирования предварительной дорожки логика подтверждения определяет состояние дорожки. В тулбоксе используются три логики подтверждения дорожек:
Логика истории: трек подтверждается, если трек был назначен обнаружению по крайней мере для M обновлений во время последних обновлений N. Можно задать конкретные значения для M и N. trackerGNN и trackerJPDA использовать эту логику.
Track Score Logic: Дорожка подтверждается, если ее счет выше заданного порога. Более высокий счет дорожки означает, что дорожка с большей вероятностью будет действительной. Счет является отношением вероятности того, что дорожка от действительной цели к вероятности того, что дорожка ложна. trackerGNN и trackerTOMHT использовать эту логику.
Интегрированная Логика: Дорожка подтверждается, если ее интегрированная вероятность существования выше порога. trackerJPDA использует эту логику.
Отслеживать удаление. Дорожка удаляется, если она не обновляется в течение разумного времени. Критерии удаления треков аналогичны критериям подтверждения треков:
Логика истории: дорожка удаляется, если дорожка не была назначена обнаружению по крайней мере P раз во время последних обновлений R.
Счет трека: трек удаляется, если его счет уменьшается с максимального счета на заданный порог.
Интегрированная Логика: Дорожка удаляется, если ее интегрированная вероятность существования ниже заданного порога.
Для получения дополнительной информации см. пример «Введение в логику отслеживания».
Основными функциями отслеживающего фильтра являются:
Спрогнозируйте дорожки к текущему времени.
Вычислите расстояния от предсказанных дорожек до обнаружений и связанных вероятностей для стробирования и назначения.
Исправьте предсказанные дорожки, используя назначенные обнаружения.
Sensor Fusion and Tracking Toolbox™ предлагает несколько фильтров отслеживания, которые могут использоваться с тремя основанными на назначении трекерами (trackerGNN, trackerJPDA, и trackerTOMHT). Комплексное введение этих фильтров смотрите в Введении к оценочным фильтрам.
Sensor Fusion and Tracking Toolbox предоставляет инструменты для анализа эффективности отслеживания, если известны правды:
Можно использовать trackAssignmentMetrics для оценки эффективности назначения и обслуживания пути. trackAssignmentMetrics предоставляет индексы, такие как количество свопов дорожек, количество шагов расхождения и количество избыточных назначений.
Можно использовать trackErrorMetrics для оценки точности отслеживания. trackErrorMetrics обеспечивает несколько значений среднеквадратичной ошибки (RMS), которые численно иллюстрируют точность эффективности трекера.
Можно использовать trackOSPAMetric для вычисления оптимальной метрики назначения подшаблона. trackErrorMetrics предоставляет три компонента скалярной ошибки - ошибку локализации, ошибку маркировки и ошибку кардинальности для оценки эффективности отслеживания.
trackerGNN, trackerJPDA, и trackerTOMHT являются трекерами, основанными на назначении, что означает, что требуется назначение track-to-detection. Тулбокс также предлагает трекер на основе случайного конечного набора (RFS), trackerPHD. Можно использовать его вспомогательные функции ggiwphd отслеживать расширенные объекты и gmphd отслеживать как расширенные объекты, так и целевые точки.
ggiwphd | gmphd | objectDetection | trackerGNN | trackerJPDA | trackerPHD | trackerTOMHT
[1] Блэкмен, С. и Р. Пополи. Проект и анализ современных систем слежения. Artech House Radar Library, Бостон, 1999.
[2] Мусицки, Д. и Р. Эванс. Joint Integrated Probabilistic Data Association: JIPDA (неопр.) (недоступная ссылка). Транзакции IEEE по аэрокосмическим и электронным системам. Том 40, № 3, 2004, стр. 1093 -1099.
[3] Вертманн, Дж. Р.. «Пошаговое описание вычислительно эффективной версии отслеживания нескольких гипотез». В Международном обществе оптики и фотоники, том 1698, стр. 228 - 301, 1992.
