В системе слежения датчики используются, чтобы генерировать измерения или обнаружения от целей в окружении. Датчики обычно имеют отверстие, посредством которого они перехватывают энергию, которая или излучает, или отражает. Датчики в первую очередь используют перехваченную энергию для получения информации о состоянии и атрибутах целей.
Датчик является активным датчиком, если перехваченная энергия берёт начало от себя, например, моностатический радар или моностатический гидролокатор. Датчик является пассивным датчиком, если перехваченная энергия исходит из внешнего источника, такого как инфракрасный (ИК) датчик, который получает излучаемую энергию от цели.
Кроме энергии принимающих целей, апертура неизбежно также собирает интерферирующую энергию, создаваемую либо природой (например, фоновым загромождением), либо человеком (таким как сигнал глушения). Поэтому качество обнаружения датчиков включает много факторов, таких как точность, разрешение, смещение и ложные предупреждения. Кроме того, важно учитывать обнаруживаемость датчиков, которая основывается на таких факторах, как пределы сканирования, поле зрения и монтаж датчиков при разработке системы слежения.
Это введение в основном обсуждает радар (включая fusionRadarSensor и radarEmitter объекты), но некоторые из следующих описаний также применяются к другим типам датчиков (включая irSensor, sonarSensor, и sonarEmitter объекты).
Радар использует радиоволновые сигналы, отраженные или излучаемые от цели, чтобы обнаружить цель. Учитывая различные строения передатчика и приемника, радар может иметь один из трех режимов обнаружения: моностатический, бистатический, или электронные меры поддержки (ESM).
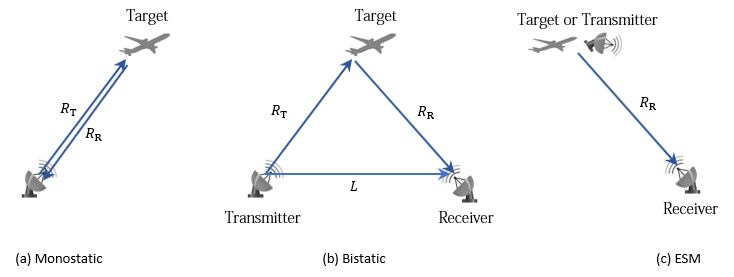
Для моностатического режима обнаружения передатчик и приемник объединяются, как показано на рисунке (а). В этом режиме R измерения области значений могут быть выражены как R = R T = R R, где R T и R R являются расстояниями от передатчика до цели и от цели до приемника, соответственно. В этом режиме измерение области значений R = c t/2, где c - скорость света, а t - общее истекшее время передачи сигнала. В дополнение к измерению области значений, моностатический датчик может также опционально сообщать о скорости области значений, азимуте и измерениях повышения цели.
Для режима бистатического обнаружения передатчик и приемник разделяются дистанционным L. Как показано рисунок (b), сигнал излучается передатчиком, отражается от цели и в конечном счете принимается приемником. Бистатическое измерение <reservedrangesplaceholder10> b области значений определено как <reservedrangesplaceholder9> b = <reservedrangesplaceholder8> T + <reservedrangesplaceholder7> R − <reservedrangesplaceholder6>. Радарный датчик получает бистатическое измерение области значений как <reservedrangesplaceholder5> b = <reservedrangesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2>, где <reservedrangesplaceholder1> <reservedrangesplaceholder0> - разница во времени между приемником, перехватывающим прямой сигнал от передатчика и перехватывающий отраженный сигнал от цели. В дополнение к измерению бистатической области значений, бистатический радар может опционально сообщить о скорости бистатической области значений, азимуте и измерениях повышения цели. Поскольку бистатическая область значений и два угла подшипника (азимут и повышение) не соответствуют одному вектору положения, они не могут быть объединены в вектор положения и сообщены в декартовой системе координат. Без дополнительной информации бистатический датчик может сообщать о измерениях только в сферической системе координат.
Для режима обнаружения ESM приемник может только перехватывать сигнал, отраженный от цели или излучаемый непосредственно от передатчика, как показано рисунок (с). Поэтому единственными доступными измерениями являются азимут и повышение цели или передатчика. Датчик ESM сообщает об этих измерениях в сферической системе координат.
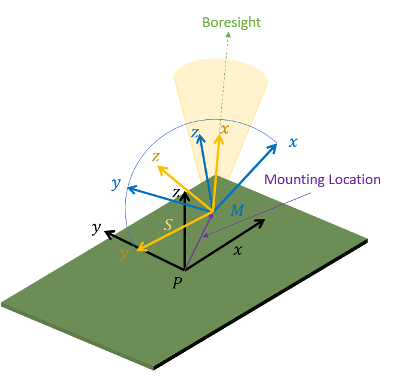
Чтобы интерпретировать обнаружение, сгенерированное радаром, необходимо понять, как радар установлен на платформе. Источник радиолокационной монтажной рамы (M) может быть смещено от начала системы координат платформы (P). Это перемещение обычно задается MountingLocation свойство объекта датчика, такого как fusionRadarSensor. Радиолокационная монтажная рамка также может иметь угловое смещение от системы координат платформы. Можно задать это перемещение угла, представленное тремя углами поворота в последовательности z - y - x с помощью MountingAngles свойство. Первоначально радиолокационная сканирующая система координат (S) совмещена с ее монтажной системой координат (M). Однако, когда радар начинает сканирование, радар может сканировать вокруг z - и y - осей монтажной системы координат. Направление x радиолокационной сканирующей системы координат совмещено с текущим направлением радиолокации .
В большинстве случаев радар работает в режиме сканирования, в котором лучи датчика пролетают назад и вперед, с шириной, равной его полю зрения (FOV), через пространственную область, заданную пределом сканирования радара. БОВ обычно составляет 3 децибела (дБ) ширины радиолокационного луча. Скорость протягивания задается UpdateRate свойство объекта датчика. Вы можете получить скорость сканирования датчика, используя его поле зрения и частоту обновления. Например, если частота обновления составляет 20 Гц, а поле зрения - 2 степени, то скорость сканирования радара составляет 40 степени в секунду. Для получения дополнительной информации о покрытии радара смотрите пример строения сканирующего радара.
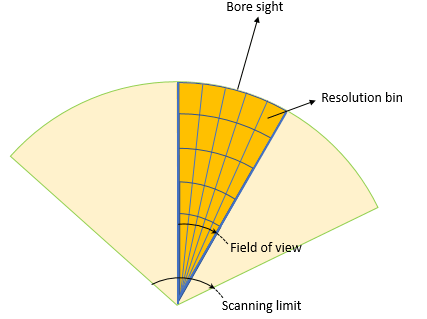
Разрешение датчика определяет способность датчика различать две цели. В трехмерное пространство интервала разрешения радара формируется азимутальными контурами, повышением контура и контура области значений. Если две цели находятся в пределах одного интервала разрешения, то радар не может различать их и сообщает о них как об одной цели в обнаружении.
Точность датчика может быть описана стандартным отклонением ошибки измерения. На точность в основном влияют два фактора: отношение сигнал/шум (ОСШ) датчика и смещение обнаружения датчика. ОСШ определяется как отношение степени отраженного сигнала к степени шума в децибелах (дБ). Отношение выше 1:1 (больше 0 дБ) указывает на больше сигнала, чем шума. Больший ОСШ приводит к меньшей ошибке измерения и более высокой точности. Для радара ОСШ обычно является функцией радарного сечения (RCS) цели. Смещение датчика в основном связано с несовершенным выравниванием или калибровкой, и часто принимается как постоянное значение. В каждом радиолокационном объекте можно задать его смещение как часть размера интервала разрешения датчика с помощью таких свойств, как AzimuthBiasFraction. Чем больше смещение, тем больше ошибок включает обнаружение.
Радар также может сделать неправильную оценку области наблюдения. Вероятность ложного предупреждения (p FA) представляет вероятность того, что радар сообщает о обнаружении в интервале разрешения, даже если интервал разрешения не занят целью. Вероятность обнаружения (P D) представляет вероятность того, что радар сообщит о обнаружении на интервале разрешения, если интервал разрешения фактически занят целью. Поэтому 1 - P D представляет вероятность того, что цель не обнаружена радаром. P D в основном является функцией ОСШ цели и p FA радара.
Когда радар работает в окружении, где другие нежелательные радиочастотные (RF) выбросы мешают формам волны, излучаемым радаром, радар может испытывать ухудшение эффективности обнаружения в направлении интерферирующих сигналов.
Во многих случаях радар имеет максимальные однозначные пределы области значений и уровня области значений. Если расстояние между мишенью и датчиком больше максимальной однозначной области значений, то датчик переносит обнаруженный диапазон в область значений [0, R max], где R max является максимальной однозначной областью значений. Например, предположим, что диапазон целевого значения R t больше, чем R max, тогда сообщаемая область значений целевого значения mod(R t, R max), гдеmod - оставшаяся после деления функция в MATLAB. В радиолокационном объекте можно отключить это ограничение, установив HasMaxUnabmiguousRange свойство к false.
В части систем слежения существует два основных класса измерений: кинематические и атрибутные. Кинематические измерения обеспечивают системы слежения информацией о существовании и местоположении цели. Типичные кинематические измерения включают диапазон, скорость области значений, азимут и повышение. Измерения атрибутов обычно содержат идентификацию и характеристики цели, такие как форма и отражательная способность. Кинематические измерения для радара описаны здесь.
В целом радар может сообщать о кинематических измерениях в сферических или декартовых координатных системах координат. Для сферических координат радар может сообщить об азимуте, повышении, области значений и измерений скорости области значений. Для Декартовых координат радар может сообщить о 2-D или 3-D измерениях положения и скорости на основе настройки. Каждый режим обнаружения радара может выводить только определенные типы измерений. Доступные координаты обнаружения для каждого режима обнаружения:
В моностатическом режиме обнаружения о обнаружениях можно сообщать в сферических или Декартовых координатных системах координат.
Для режима бистатического обнаружения о обнаружениях можно сообщать только в сферической системе координат, и сообщаемая область значений является бистатической областью значений для цели.
Для режима обнаружения ESM о обнаружениях можно сообщать только в сферической координатной системе координат.
В Sensor Fusion and Tracking Toolbox обнаружение объектов выхода датчика в виде objectDetection объекты. Система координат objectDetection объект содержит следующие свойства:
| Свойство | Определение |
|---|---|
| Время | Время обнаружения |
| Измерение | Измерения объекта |
| Измерительный шум | Измерьте шумовую ковариационную матрицу |
| SensorIndex | Уникальный идентификатор датчика |
| ObjectClassID | Уникальный идентификатор для классификации объектов |
| MeasurementParameters | Параметры, используемые для интерпретации измерения, такие как строения датчика и информация о системе координат обнаружения |
| ObjectAttributes | Дополнительная информация о цели, такой как идентификатор цели и целевой RCS |
Обратите внимание, что MeasurementParameters свойство содержит существенную информацию, используемую для интерпретации измерений, такую как положение датчика (положение, скорость и ориентация) и информацию координатной системы координат для измерений во время обнаружения. Для получения дополнительной информации смотрите Параметры измерения и пример Преобразования Обнаружений в Формат objectDetection.
