Сгенерируйте наклон положения фиксированной частоты
Motor Control Blockset/Controls/Control Reference
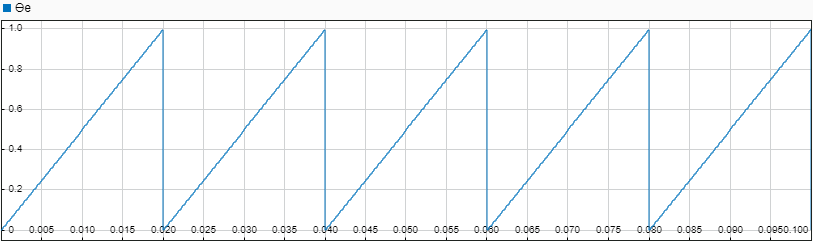
Блок Position Generator генерирует сигнал изменения положения (с частотой, которая идентична частоте сигнала опорного напряжения), используя значение шага положения опорного сигнала.
Мы рекомендуем использовать дискретный решатель с фиксированным шагом для этого блока, чтобы включить генерацию кода и обеспечить точную симуляцию.
3-Phase Sine Voltage Generator | ACIM Slip Speed Estimator | Sine-Cosine Lookup | Vector Control Reference




