Вычисление электрического положения и механической скорости ротора
Блоки управления двигателем/бездатчиковые оценки
Блок Sliding Mode Observer вычисляет электрическое положение и механическую скорость PMSM с помощью значений относительных напряжений и токов вдоль α- и β осей стационарной αβ системы отсчета.
Эти уравнения описывают расчет блока электрического положения и механической скорости.
Эти уравнения описывают операцию наблюдателя скользящего режима в дискретном времени при помощи значений в относительных единицах:
где:
являются коэффициентом противо-ЭДС статора и током для оси α.
являются коэффициентом противо-ЭДС статора и током для оси β.
являются напряжениями питания статора.
- сопротивление статора.
- индуктивность статора.
- редактирование потока от постоянных магнитов.
- электрическая скорость вращения.
- электрическое положение ротора.
это время.
- период дискретизации.
- количество выборок.
- номинальное напряжение, соответствующее 1 в относительных единицах.
- номинальный ток, соответствующий 1 относительной единице.
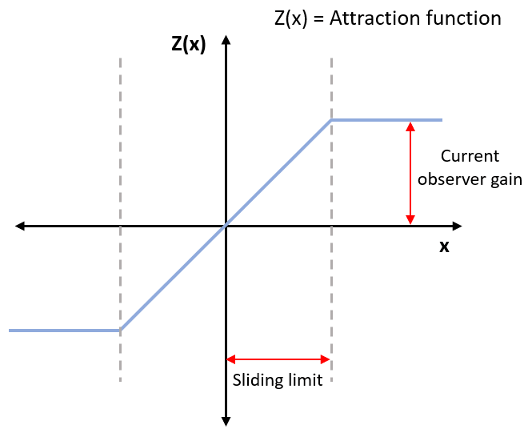
- функция притяжения.
- частота отключения фильтра в циклах на выборку.
- частота отключения в циклах в секунду.
- частота дискретизации в выборках в секунду.
- предполагаемый коэффициент противо-ЭДС.
Используйте параметры Current observer gain и Sliding surface limit, чтобы настроить блок.
Чтобы улучшить стабильность, увеличьте Sliding surface limit или уменьшите Current observer gain.
Чтобы уменьшить искажения, уменьшите Current observer gain или увеличьте Sliding surface limit.
[1] Y. Kung, N.V. Куинх, Ц. Хуан и Л. Хуан, «Проектирование и симуляция адаптивной регулировки скорости для основанного на SMO двигателя PMSM без датчика», 4-я Международная конференция 2012 года по вопросам Intelligent and Advanced Systems (ICIAS2012), Куала-Лумпур, 2012, стр 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Чжан Янь и В. Уткин, «Наблюдатели скользящего режима для электрических машин - обзор», 28-я ежегодная конференция Общества промышленной электроники IEEE 2002. IECON 02, Sevilla, 2002, pp. 1842-1847 vol.3. (doi: 10.1109/IECON.2002.1185251)
[3] Т. Бернардес, В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро, «Наблюдатель Скользящего режима Дискретного времени для Контроля за Вектором Без датчика Постоянного магнита Синхронная Машина», в Сделках IEEE на Industrial Electronics, издании 61, № 4, стр 1679-1691, апрель 2014 (doi: 10.1109/TIE.2013.2267700)
[4] Z. Guo and S. K. Panda, «Проект наблюдателя скользящего режима для бездатчикового управления SPMSM, работающего на средних и высоких скоростях», Симпозиум IEEE 2015 по бездатчиковому управлению для электроприводов (SLED), Сидней, NSW, 2015, (doi: 10.1109/SLED.2015.7339255)
Clarke Transform | Discrete PI Controller with anti-windup and reset | Flux Observer | Inverse Park Transform | Sine-Cosine Lookup

