В физическом оборудовании ток двигателя, считанный датчиками тока, фильтруется и масштабируется до измеряемой области значений АЦП. Периферийный АЦП в процессоре считывает текущие сигналы и выводит счетчики АЦП для текущего алгоритма управления. Этот рисунок показывает пример того, как можно смоделировать алгоритмы измерения тока фазы двигателя и обусловленности сигнала.
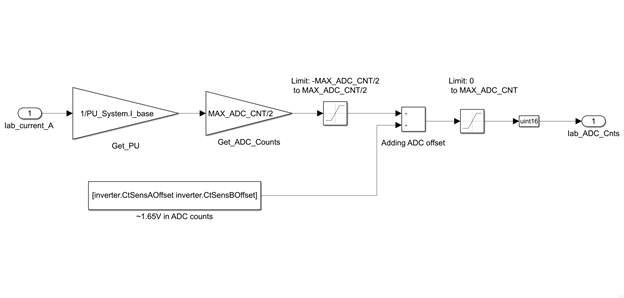
Максимальный измеряемый пиковый ток рассматривается как базовый ток. Счетчики АЦП могут быть вычислены из базового тока, полномасштабных значений АЦП, наряду со смещением АЦП, при помощи этого уравнения:
Для параметров инвертора по умолчанию и схемы формирования сигналов для коммерчески доступных инверторов, смотрите mcb_SetInverterParameters.m файл. Чтобы добавить новое строение инвертора, создайте тип инвертора в этом файле и используйте это в скрипте инициализации модели для инициализации параметра. Если вы используете низкочастотные фильтры для измерения тока, добавьте среднюю модель, чтобы фильтровать ток.
