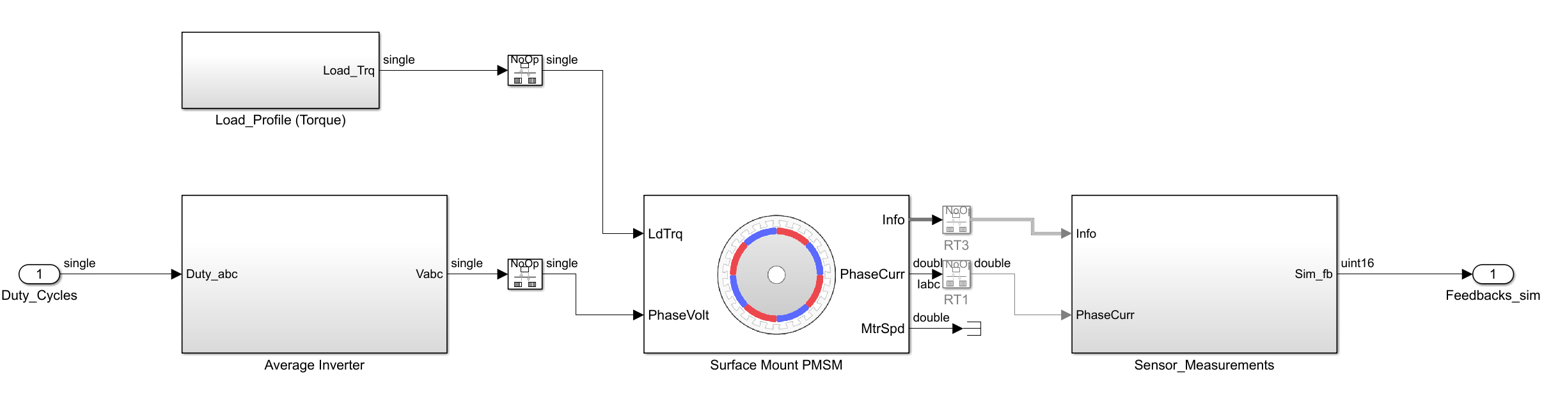
Конечным шагом разработки модели объекта управления с помощью Motor Control Blockset™ является интеграция блоков и подсистем, которые вы создали ранее. Завершенная модель объекта управления принимает нормированный ШИМ от контроллера и выводит токи фазы двигателя и положение.