Рекомендуемая практика состоит в том, чтобы первоначально выбрать длительность контрольного интервала (Ts свойства контроллера), а затем держать его постоянным, когда вы настраиваете другие параметры контроллера. Если станет очевидно, что первоначальный выбор был плохим, можно пересмотреть Ts. Если вы это сделаете, то, возможно, вам потребуется сохранить другие параметры.
Качественно, когда Ts уменьшается, отказ от неизвестных нарушений порядка обычно улучшается, а затем плато. Значение Ts, при котором эффективность плато, зависит от динамических характеристик объекта.
Однако, когда Ts становится маленьким, вычислительные усилия резко возрастают. Таким образом, оптимальным выбором является баланс эффективности и вычислительных усилий.
В Модели Прогнозирующего Управления, горизонте предсказания, p также является важным фактором. Если вы решите удерживать постоянную длительность горизонта предсказания (продукт p * Ts), p должны изменяться обратно с Ts. Многие размеры массивов пропорциональны p. Таким образом, с увеличениями p требования к памяти контроллера и времени решения QP увеличиваются.
Примите во внимание следующее при выборе Ts:
Как приблизительное руководство, установите Ts между 10% и 25% вашего минимального необходимого времени отклика с обратной связью.
Запустите по крайней мере одну симуляцию, чтобы увидеть, значительно ли улучшается неизмеренное подавление помех, когда Ts уменьшается вдвое. Если это так, рассмотрите пересмотр Ts.
Для управления процессами Ts > > 1 с является общим, особенно когда MPC управляет одноконтурными контроллерами более низкого уровня. Другие приложения, такие как автомобильный или аэрокосмический, могут потребовать Ts < 1 с. Если время, необходимое для решения QP в режиме реального времени, превышает желаемый контрольный интервал, рассмотрите опцию Явный MPC.
Для объектов с задержками количество переменных состояния, необходимых для моделирования задержек, обратно пропорционально Ts.
Для разомкнутого контура нестабильных объектов, если p * Ts слишком велик, так что объект переходных характеристик стать бесконечным в течение этого количества времени, ключевые параметры, необходимые для вычислений MPC, становятся неопределенными, генерируя сообщение об ошибке.
Контроллер наследует свой временной модуль от модели объекта управления. В частности, контроллер использует TimeUnit свойство объекта LTI модели объекта управления. Это свойство по умолчанию равняется секундам.
Предположим, что текущий контрольный интервал k. prediction horizon, p, является количеством будущих контрольных интервалов, которые контроллер MPC должен оценить путем предсказания при оптимизации своих MV при k контрольные интервалы.
Рекомендуемая практика состоит в том, чтобы выбрать p на раннем этапе проектирования контроллера, а затем сохранить его постоянным во время настройки других настроек контроллера, таких как веса функции затрат. Другими словами, не используйте p регулировки для настройки контроллера. Скорее значение p должно быть таким, чтобы контроллер был внутренне стабилен и предвидел нарушения ограничений достаточно рано, чтобы позволить корректирующие действия.
Если желаемое время отклика с обратной связью T, и контрольный интервал Ts, попробуйте p, таким образом что <reservedrangesplaceholder1> ≈ <reservedrangesplaceholder0>.
Задержки на объекте накладывают нижнюю границу на возможное время отклика с обратной связью. Выберите p соответственно. Чтобы проверить на нарушение этого условия, используйте review команда.
Рекомендуемая практика заключается в увеличении p до тех пор, пока дальнейшие увеличения не окажет незначительное влияние на эффективность. Если объект разомкнутого контура нестабильен, максимальное p - это количество контрольных интервалов, необходимое для того, чтобы разомкнутый контур переходной характеристики объекта стал бесконечным. p > 50 редко требуется, если Ts не слишком маленькая.
Неблагоприятные характеристики объекта в сочетании с небольшой p могут сгенерировать внутренне нестабильный контроллер. Чтобы проверить это условие, используйте review команда, и увеличить p по возможности. Если p уже велик, примите во внимание следующее:
Увеличение Ts.
Увеличьте веса функции стоимости на шагах MV.
Измените горизонт управления или используйте блокировку MV (см. Манипулирование блокировкой переменной).
Используйте небольшую p с взвешиванием терминалов, чтобы аппроксимировать поведение LQR (См. «Веса терминалов и ограничения»).
Горизонт управления, m, является количеством перемещений MV, которые должны быть оптимизированы при k контрольного интервала. Горизонт управления падает между 1 и горизонтом предсказания p. Значение по умолчанию является m = 2. Независимо от вашего выбора для m, когда контроллер работает, оптимизированное перемещение MV в начале горизонта используется, и любые другие отбрасываются.
Причины сохранить m < < p следующие:
Small m означает меньше переменных для вычисления в QP, решаемом на каждом контрольном интервале, что способствует более быстрым расчетам.
Если объект включает задержки, m < p важно. В противном случае некоторые движения MV могут не повлиять ни на один из выходов объекта до конца горизонта предсказания, приводя к сингулярной QP Гессианской матрице. Чтобы проверить на нарушение этого условия, используйте review команда.
Малый m способствует (но не гарантирует) внутренне стабильному контроллеру.
Можно задать шаг расчета, горизонт предсказания и управлять горизонтом при создании mpc контроллер в командной строке. После создания контроллера mpcObj, можно изменить шаг расчета и горизонты путем установки следующих свойств контроллера:
Шаг расчета - mpcObj.Ts
Горизонт предсказания - mpcObj.p
Горизонт управления - mpcObj.m
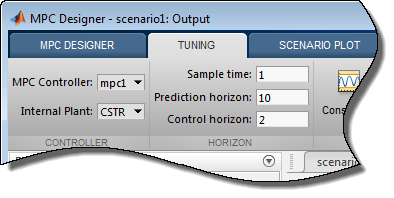
Кроме того, при разработке контроллера с помощью приложения MPC Designer, на вкладке Tuning, в разделе Horizon, можно изменить шаг расчета и горизонты.