Вращательный привод двойного действия в изотермической гидравлической системе
Simscape/Жидкости/Изотермическая жидкость/Приводы

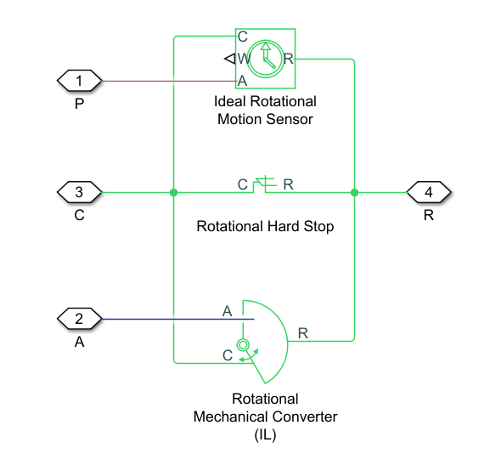
Блок Single-Acting Rotary Actuator (IL) моделирует привод вращения, который преобразует давление жидкости в механический крутящий момент в изотермической гидравлической сети. Движение поршня, когда он близок к полному удлинению или полному уборке, ограничено одной из трех моделей жёсткого упора.
Порт A является портом для изотермической жидкости, сопоставленным с входным отверстием жидкой ёмкости. Порты R и C являются портами механического вращений, сопоставленными с вращающимся валом и корпусом привода, соответственно. Если для Mechanical orientation задано значение Pressure at A causes positive rotation of R relative to Cдавление в ёмкости вызывает положительное вращение вала в порте R относительно порта C. Когда угол вала вычисляется внутри, порт q физического сигнала сообщает угол. Когда угол устанавливается соединением с Simscape™ Multibody™ соединением, он принимается как физический сигнал в порте q.
Перемещение поршня измеряется как положение на порте R относительно порта C. Этот Mechanical orientation определяет направление перемещения поршня. Перемещение поршня нейтральный, или 0, когда объем ёмкости равен Dead volume. Когда перемещение принято как вход, убедитесь, что производная положения равна скорости поршня. Это автоматически происходит, когда вход получен от блочного соединения Rotational Multibody Interface к шарниру Simscape Multibody.
Чтобы избежать механических повреждений привода, когда он полностью выдвинут или полностью втянут, привод обычно отображает нелинейное поведение, когда поршень приближается к этим пределам. Блок Вращательного Привода (IL) Одностороннего Действия моделирует это поведение с выбором трех моделей жёсткого упора, которые моделируют податливость материала через систему пружины-демпфера. Модели жёсткого упора:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Жёсткий упор моделируется, когда поршень находится на своей верхней или нижней границе. Граничная область находится в Transition region начального хода Stroke или поршня. За пределами этой области,
Для получения дополнительной информации об этих настройках см. страницу Блок Упора Вращения.
Блок привода содержит три блока библиотеки фундаментов:
Базовые компоненты блоков
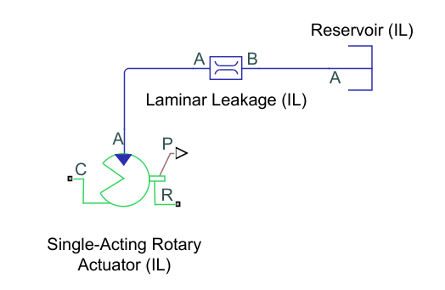
Ламинарные утечки в блоке Single-Acting Rotary Actuator (IL) не учитываются. Чтобы включить утечки в свою симуляцию, установите параметр Cross-sectional geometry равным Custom и соедините порт A с портом A блока Laminar Leakage (IL). Соедините порт B блока Laminar Leakage (IL) с блоком Резервуар (IL).
Добавление утечек в симуляцию
Привод двойного действия (IL) | Вращательный привод двойного действия (IL) | Вращающийся Гидропривод одностороннего действия (IL) | Гидропривод одностороннего действия (IL)

