Механизм передачи, который позволяет ведомым валам вращаться с различными скоростями
Simscape/Трансмиссия/Передачи

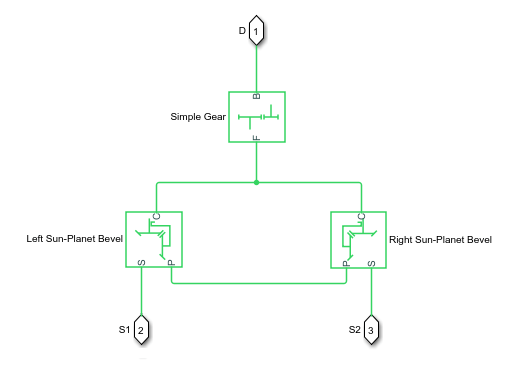
Блок Differential представляет собой зубчатый механизм, который позволяет ведомым валам вращаться с различными скоростями. Дифференциалы распространены в автомобилях, где они позволяют различным колесам вращаться на разных скоростях во время поворота. Порты D, S1 и S2 представляют продольный приводной вал и валы солнечной передачи дифференциала, соответственно. Любой из валов может привести в действие два других.
Блок моделирует отличительный механизм как структурный компонент на основе Simple Gear и Sun-Planet Bevel блоки Simscape™ Driveline™. Рисунок демонстрирует эквивалентную блок-схему для блока Differential.
Чтобы увеличить точность модели передачи, задайте такие свойства, как инерция передачи, потери сетки и вязкие потери. По умолчанию инерция передачи и вязкие потери приняты незначительными. Блок позволяет вам задать инерцию трансмиссии и внутренних планетных передач. Чтобы смоделировать инерцию внешних передач, соедините блоки Simscape Inertia с портами D, S1 и S2.
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Friction model равным Temperature-dependent efficiency.
Дифференциал накладывает одно кинематическое ограничение на три соединенные оси, такое что
где:
ωS1 - скорость вала 1 солнечной шестерни.
ωS2 - скорость вала 2 солнечной шестерни.
Отрицательные значения означают, что дифференциал находится слева от осевой линии. Три степени свободы сокращаются до двух независимых степеней свободы. Зубчатые пары (1,2) = (S, S) и (C, D). C является несущей.
Сумма боковых движений является преобразованным продольным движением. Различие боковых движений, , не зависит от продольного движения. Общее движение боковых валов является суперпозицией этих двух независимых степеней свободы, которые имеют это физическое значение:
Продольная степень свободы эквивалентна двум боковым валам, вращающимся с одной и той же скоростью вращения, и при фиксированном соотношении относительно продольного вала.
Дифференциальная степень свободы эквивалентна сохранению продольного ведущего вала заблокированным, где ωD - скорость ведущего вала, в то время как боковые валы вращаются относительно друг друга в противоположных направлениях, .
Крутящие моменты на боковой оси ограничиваются крутящим моментом на продольной оси, так что поток полезной степени равен нулю:
где:
τS1 и τS2 являются крутящими моментами вдоль боковых осей.
τD - продольный крутящий момент.
Ploss - это потери степени.
Когда кинематические и силовые ограничения объединяются, идеальный случай приводит к
где gD - передаточное отношение для продольного приводного вала.
Ограничение, накладываемое на эффективный Differential блок, состоит из двух подграфиков конического зубчатого колеса между Солнцем и планетой.
Первая подграница обусловлена связыванием двух конических передач солнечная планета с несущей:
где gSP1 и gSP2 - передаточные числа для солнечно-планетных передач.
Вторая подграница обусловлена связыванием держателя с продольным приводным валом:
Передаточные отношения Солнце-планета нижележащие конические передачи Солнце-планета, с точки зрения радиусов, r, солнечно-планетных передач:
Блок Differential реализован с , оставив gD свободно регулировать.
В неидеальном случае τloss ≠ 0. Для получения дополнительной информации см. «Моделирование передач с потерями».
Передачи приняты жесткими.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации см. «Настройка точности модели».
Disk Friction Clutch | Simple Gear | Sun-Planet Bevel
