Уменьшите различие скоростей между двумя соединенными валами
Simscape/Трансмиссия/Передачи

Блок Limited-Slip Differential представляет дифференциал с ограничением скольжения (LSD), который является зубчатым узлом, который ограничивает различие скоростей между двумя соединенными валами. Блок моделирует механизм LSD как структурный компонент, который объединяет дифференциал и муфту.
Дифференциальный компонент в блоке LSD является открытым дифференциалом. Открытый дифференциал является зубчатым механизмом, который позволяет двум ведомым валам вращаться с различными скоростями. В автомобиле дифференциал позволяет внутренним колесам вращаться медленнее, чем внешним колесам, когда транспортное средство вращается. Транспортное средство, имеющий валы колес, соединенные открытым дифференциалом, может застревать, когда одно из колес свободно скользит и вращается из-за потерь тяги. Это транспортное средство перестаёт двигаться, потому что приводной вал подает меньше степень на колесо с тягой, чем он подает на прядильное колесо.
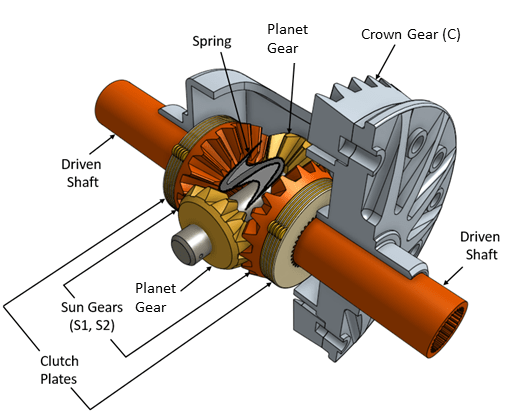
В том же сценарии транспортное средство, которая имеет LSD, с меньшей вероятностью застрянет, потому что она содержит узел сцепления, который может передавать степень к колесу, которое сохраняет тягу. Компонентом муфты в блоке LSD является фрикционная муфта, которая имеет два набора плоских фрикционных пластин. Муфта входит в зацепление, когда приложенное давление превышает пороговое давление зацепления. В LSD предварительная нагрузка пружины, которая разделяет солнечные передачи, нажимает пластины в обоих наборах вместе. Когда валы испытывают тяговый дифференциал, сателлитные шестерни прикладывают дополнительную силу в направлении вала высокой тяги. Если дополнительное давление превышает порог сцепления, узел сцепления входит в зацепление. Зацепление позволяет приводному валу передавать больше мощности на медленнее вращающееся колесо высокой тяги. Дополнительная степень уменьшает различие в скорости двух валов. Поскольку колесо высокой тяги продолжает вращаться, транспортное средство продолжает двигаться.
Рисунок показывает ориентацию основных компонентов в механизме LSD. Шестерня привода не видна, это представление.
Блок Limited-Slip Differential моделирует механизм LSD как структурный компонент, основанный на Simscape™ Driveline™ Differential и Disk Friction Clutch блоках. Дифференциальный механизм, смоделированный блоком Differential, является структурным компонентом, основанным на двух других блоках Simscape Driveline, Simple Gear и Sun-Planet Bevel. На блок схеме показаны структурные компоненты LSD.
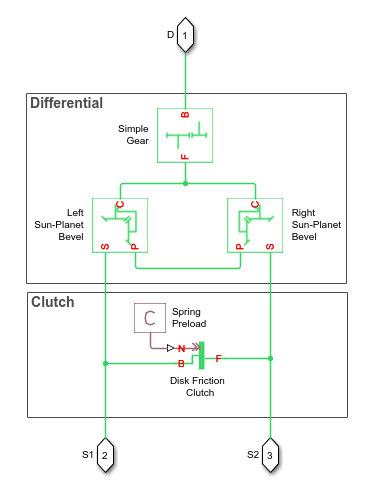
Порты блока Limited-Slip Differential связаны с приводным валом (порт D) и двумя ведомыми валами (портами S1 и S2), которые соединяют солнечные передачи с колесами.
Блок Limited-Slip Differential позволяет вам задавать инерцию только для трансмиссии и внутренних планетных передач. По умолчанию инерция внешних передач принимается незначительной. Чтобы смоделировать инерцию внешних передач, соедините блоки Simscape Inertia с портами D, S1 и S2 .
Таблица показывает направление вращения портов ведомого вала для различных параметризаций блоков и входных условий.
| Направление вращения портов ведомого вала (S1 и S2) | Расположение коронной передачи относительно осевой линии | Направление вращения порта D привода | Относительное скольжение по дифференциалу |
|---|---|---|---|
| Положительный | Правильно | Положительный | 0 |
| Правильно | Положительный | > 0 |
| Отрицательный | Правильно | Отрицательный | 0 |
| Правильно | Отрицательный | > 0 |
| Отрицательный | Левый | Положительный | 0 |
| Левый | Положительный | > 0 |
| Положительный | Левый | Отрицательный | 0 |
| Левый | Отрицательный | > 0 |
Чтобы изучить математические модели для структурных компонентов блока Limited-Slip Differential, смотрите:
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Friction model равным Temperature-dependent efficiency.


