Полная симуляция ходовой части автомобиля в sdl_car Пример включает все основные методы моделирования привода и многие ключевые Simscape™ Driveline™ функций. Он включает модели двигателя и трансмиссии и модель муфты привод-колесо-дорога. Двигатель и трансмиссия связаны с гидротрансформатором. Программируемое управление сцеплением перемещает коробку передач через четыре передачи во время симуляции. Сигналы давления сцепления являются плавными и более реалистичными, чем сигналы резкого давления сцепления в более простых примерах ходовой части. В этом разделе описываются эти функции, подсистемы и их отношения и цели, что приводит вас к фактической симуляции.
Откройте пример. Модель содержит переменные рабочего пространства модели для параметризации некоторых блоков. Для получения информации о создании, доступе и изменении переменных рабочего пространства модели, смотрите Задать источник для данных в рабочем пространстве модели и Изменить данные рабочему пространству модели.
Транспортное средство с четырехскоростной моделью трансмиссии
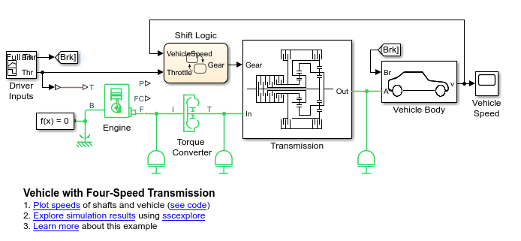
Основными подсистемами и компонентами привода являются:
Входы драйвера - Профиль дросселя/тормоза
Engine - Системной модели искрового зажигания и дизельного двигателя
Гидротрансформаторы - Трехчастный гидротрансформатор, состоящий из рабочего колеса, турбины и статора.
Подсистема трансмиссии - CR-CR 4-ступенчатая коробка передач
Логика сдвига - Stateflow® реализованный контроллер передачи
Кузов транспортного средства - Транспортное средство, шины и тормозов
В то время как двигатель первоначально простаивает с ненулевой скоростью, выход трансмиссии и транспортное средство в целом первоначально не перемещаются.
Блок Driver Inputs является Simulink® Блок Signal Builder, который обеспечивает дроссельные и тормозные сигналы для двигателя и системы управления передачей. Откройте блок Driver Inputs, чтобы просмотреть профиль дросселя/тормоза для симуляции.
Сигнал дросселя запрограммирован, чтобы создать реалистичный профиль ускорения и согласиться с последовательностью перемены передач, описанной в Управлении муфтами. Сигнал дросселя подается на двигатель и на контроллер трансмиссии.
Сигнал тормоза подает вход силу, которая приводит в действие торможение в блоке Double-Shoe Brake в подсистеме Транспортного средства Body.
В целях моделирования системы двигатель или двигатель задает крутящий момент выхода как функцию скорости привода. Двигатель имеет соединительный порт, соединяющий его вращательно с остальной частью системы.
Библиотека Engines содержит блоки, которыми вы управляете, используя вход физический сигнал для дросселя. Можно параметризовать Generic Engine блок с помощью векторов, чтобы задать скорость и крутящий момент. Блок вычисляет максимально возможный крутящий момент как функцию от скорости вращения двигателя в любой момент. Сигнал дросселя управляет тем, сколько максимального крутящего момента может выдать двигатель. Блок Piston Engine учитывает мгновенный крутящий момент, передаваемый на ведущий вал двигателя. Мгновенный крутящий момент позволяет вам смоделировать вибрации в ходовую часть из-за вращения поршня. Чтобы смоделировать только поршневой механизм двигателя внутреннего сгорания, используйте блок Piston.
The sdl_car В примере используется блок Generic Engine, сконфигурированный как тип искрового зажигания. Свойства блока, заданные в диалоговом окне, включают максимальную степень, скорость на максимальной степени и максимально возможную скорость двигателя. Чтобы просмотреть настройки модуля, щелкните блок Engine. Крутящий момент и движение двигателя моделируются относительно земли вращения, которая принимается за базовую ссылку двигателя и начальной точки приводной линии, или механических вращательных, соединений в этой модели.
Simscape Driveline позволяет создавать сложные, пользовательские модели движка. Несколькими важными функциями двигателя, которые следует учитывать в сложной модели, являются:
Отличение статического поведения от запуска двигателя, когда функция крутящий момент двигателя с частотой вращения еще не достигла своей максимально возможной огибающей
Детали производства механической степени, такие как сжатие воздуха и топлива и сжигание
Дополнительные элементы управления, выходящие за рамки того, что может быть представлено одним сигналом дросселя
Подсистема 4-скоростной передачи CR-CR в sdl_car модель подобна другим примерам с той же трансмиссией. Свойства муфты и планетарной передачи заданы в блоках с переменными рабочего пространства модели.
| Переменная рабочей области | Описание |
|---|---|
eff_tor_rad | Муфта: эффективный радиус крутящего момента (м) |
num_fric_surf | Муфта: количество поверхностей трения в контакте |
engagement_area | Муфта: площадь поверхности трения в контакте (м2) |
fric_coeff | Муфта: кинетический коэффициент трения контактных поверхностей |
peak_normal | Муфта: статический (запирающий) коэффициент трения поверхностей, находящихся в контакте |
velTol | Муфта: допуск блокировки скорости муфты (рад/с) |
pressThresh | Муфта: Нормированный порог давления |
p0 | Муфта: Нормализация физического давления (Pa) |
Для получения дополнительной информации о передачах, сцеплениях и коробках передач, смотрите Disk Friction Clutch блок страницы с описанием.
The sdl_car модель соединяет двигатель и коробку передач через блок гидротрансформатора.
Гидротрансформатор
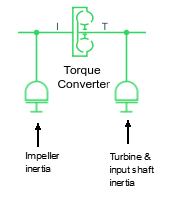
Как и муфта, гидротрансформатор соединяет две независимые оси привода, чтобы передать угловое движение и крутящий момент от входа к выходу валу. Однако, в отличие от муфты, гидротрансформатор никогда не блокируется. Гидротрансформатор передает движение гидродинамической вязкостью, а не поверхностным трением. Таким образом, гидротрансформатор не проходит через дискретные ступени и избегает разрывов движения, присущих фрикционным муфтам.
Для имитации холостого хода двигателя в начале симуляции начальное условие инерции рабочего колеса является ненулевой скоростью вращения. Начальное условие инерции турбины и входного вала - ноль скорости.
Для получения дополнительной информации об этих блоках смотрите Torque Converter и Inertia страниц с описанием блоков.
Коробка передач подает свой выходной крутящий момент в конечную подсистему привода, Корпус Транспортного средства. Эта подсистема представляет инерцию транспортного средства (нагрузку на коробку передач), колеса, тормоза, условия движения и контакт колеса с дорогой. Подсистема моделирует только задние колеса как управляемые трансмиссией.
Конечная Подсистема Привода: Кузов Транспортного средства
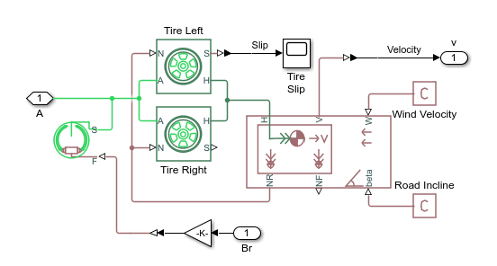
Подсистема имеет две основные области.
Правый и левый блоки шин принимают крутящий момент привода и вращение от трансмиссии в своих портах вращения оси колеса (A). Учитывая нормальную или вертикальную нагрузку (N), этот крутящий момент и вращение преобразуются в силу тяги и перемещение в поступательных портах ступицы колеса (H).
Шины вращаются неидеально, скользя, прежде чем они полностью генерируют тягу и реагируют на поверхность дороги. Проскальзывание шин левой шины сообщается как физический сигнал и преобразуется в Simulink для использования с возможностями проскальзывания шин.
Блок Double-Shoe Brake выполнен в виде тормоза, выполненного в виде двух поворотных жестких колодок, симметрично установленных внутри или снаружи барабана и управляемых одним приводом. Тормозной блок преобразует сигнал торможения от блока Драйвера Inputs в силу привода, которая оказывает момент трения на вал, который соединяет тормозной барабан с блоками шин.
Последовательность линий соединения привода модели заканчивается блоком Vehicle Body, который задает транспортное средство геометрию, массу, аэродинамическое сопротивление и начальную скорость ( нуль). Этот блок генерирует нормальные силы, которые блоки Tire принимают как вертикальные нагрузки. Корпус транспортного средства принимает развитую силу тяги и движение в своем горизонтальном поступательном порте (H) движения. Модель транспортного средства тела также принимает скорость ветра (W) и наклон дороги (бета), оба обеспечивают физические константы.
Сила вертикальной нагрузки на заднее колесо (NR) выводится назад в блоки Шина. Вертикальная нагрузка на переднее колесо (NF) не используется.
Прямая скорость ( V) транспортного средства преобразуется и сообщается, через выходной порт подсистемы, в возможности скорости Транспортного средства.
The sdl_car пример моделирует только задние колеса, задние шины и корпус транспортного средства, без более реалистичных компонентов ходовой части дифференциальных передач и тормозов. The sdl_vehicle_4wd пример иллюстрирует моделирование транспортного средства, которое имеет четыре колеса и переднюю и заднюю дифференциальные передачи.
Для получения информации о моделировании тормозных систем с помощью сцеплений, смотрите Движение Тормоза с Использованием Сцеплений и Модель Двухскоростной трансмиссии с торможением.
Чтобы выбрать и включить соответствующий набор передач, модель использует блок Stateflow и спецификацию сцепления. Чтобы увидеть, как работают эти компоненты, вернитесь к основной модели sdl_car.
Блок Stateflow, который помечен как Shift Logic, реализует выбор передачи для трансмиссии. Блок определяет, смещаться ли вверх или вниз на основе входа от двух других компонентов в модели. Блок Driver Inputs подает информацию о дросселе и торможении. Подсистема кузова транспортного средства обеспечивает скорость кузова транспортного средства через цикл обратной связи.
Чтобы открыть схему Stateflow, дважды кликните блок Shift Logic. Model Explorer используется, чтобы задать входы как скорость дросселя и транспортного средства, а выход как желаемое число передач. Два штриховых состояния AND отслеживают состояние передачи и состояние процесса выбора передачи. Полный график выполняется как система дискретного времени. Схема Stateflow, показанная на рисунке, иллюстрирует функциональность блока.
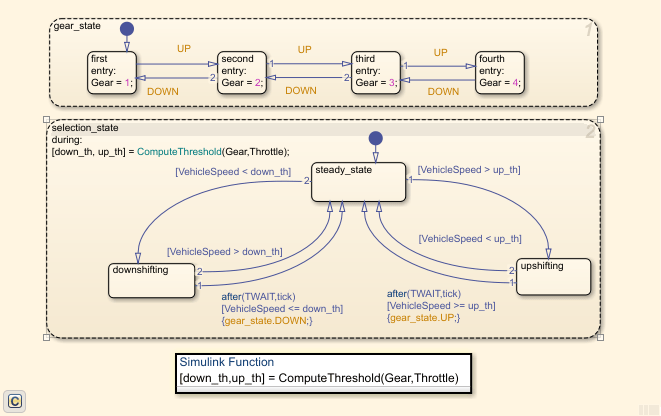
Модель вычисляет пороги скорости переключения вверх и вниз как функцию от мгновенных значений передачи и дросселя. Находясь в steady_stateмодель сравнивает эти значения с текущей скоростью транспортного средства, чтобы определить, требуется ли сдвиг. Если это так, он входит в одно из подтверждающих состояний (upshifting или downshifting), которое записывает время входа.
Если скорость транспортного средства больше не удовлетворяет условию сдвига, в то время как в состоянии подтверждения модель игнорирует сдвиг, и она переходит назад к steady_state. Установившееся состояние предотвращает посторонние сдвиги из-за шумовых условий. Если условие сдвига остается действительным в течение длительности TWAIT такты, модель переходит через нижний узел соединения и, в зависимости от текущей передачи, она транслирует одно из событий сдвига. Модель снова активируется steady_state после перехода через одно из центральных соединений. Событие сдвига, которое транслируется на gear_selection активирует переход на соответствующую новую передачу. Блок Stateflow выводит информацию о передаче в подсистему расписания сцепления, которая находится в подсистеме трансмиссии.
Сигнал от блока Stateflow к расписанию сцепления управляет пятью муфтами передачи 4-Speed CR-CR. Чтобы увидеть расписание сцепления, откройте Подсистему Трансмиссии, а затем Подсистему Расписания Сцепления.
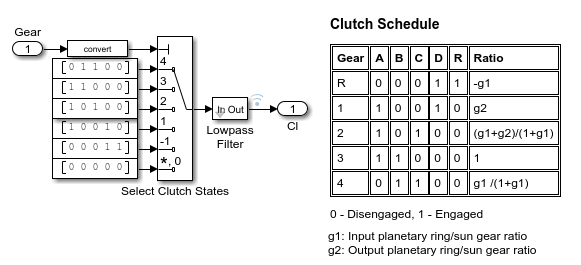
Модель сконфигурирована для симуляции в течение 50 секунд. Таблица показывает профиль передачи для симуляции.
| Временные области (Области) значений | Настройки редуктора CR-CR |
|---|---|
| 0–3.96 | 1 |
| 3.96–10.48 | 2 |
| 10.48–40.68 | 3 |
| 40.68–50 | 4 |
Симулируйте машину.
Чтобы увидеть результаты с помощью Simscape Results Explorer, в описании в окне модели, нажмите Explore simulation results.
Чтобы построить график скорости вращения в об/мин и степени в Ваттах для двигателя:
На левой панели окна Диспетчера результатов разверните узел для Engine
Щелкните узел F, а затем узел w.
Чтобы изменить модули для оси Y на обороты в минуту, нажмите кнопку со стрелой под меткой оси Y (rad/s) и выберите rpm.
Чтобы добавить график степени, которую двигатель подает на гидротрансформатор, Ctrl + щелкните P узел.
Добавьте график проскальзывания шины.
Ctrl + щелкните, чтобы развернуть Vehicle_body узел.
Ctrl + щелкните, чтобы развернуть Tire_Left узел.
Ctrl + щелкните по S узлу.
Добавьте график скорости транспортного средства.
Ctrl + щелкните, чтобы развернуть второй Vehicle_body узел.
Ctrl + щелкните по v узлу.
Чтобы изменить модули на километры в час, нажмите кнопку со стрелой под меткой оси Y (m/s), выберите Specify, и для Specify your unit введите km/hr.
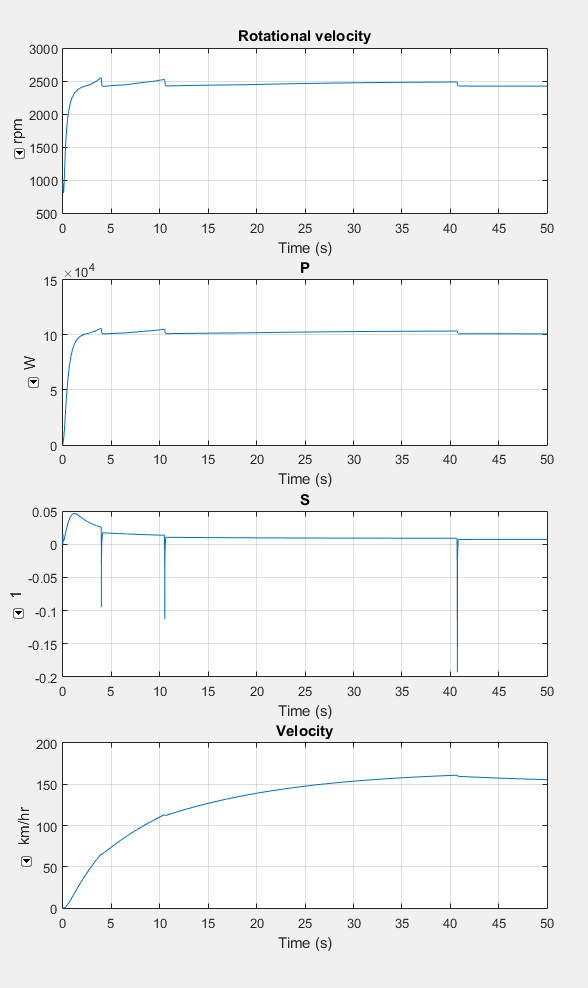
Графики показывают, что для:
Скорость вращения двигателя- когда коробка передач переключается на вторую передачу на 3,96 секунде, двигатель достигает своей максимальной скорости и степени.
Скольжение шины - когда коробка передач переходит на более высокие передачи, отношение скоростей увеличивается. Коэффициент привода падает, и скольжение шины уменьшается. Движение шины более близко приближается к идеальному (нежесткому) движению с более высокими скоростями.
Скорость транспортного средства - скорость увеличивается меньше с каждым повышением передачи для передач один, два и три. Скорость немного уменьшается, прежде чем начинает стабилизироваться, когда машина находится на четвертой передаче.
