Двухосное транспортное средство с продольной динамикой и движением и регулируемой массой, геометрией и свойствами перетаскивания
Simscape/Driveline/Шины и автомобили
Блок Vehicle Body представляет собой двухосный корпус транспортного средства в продольном движении. На транспортное средство может быть одинаковое или разное количество колес на каждой оси. Например, два колеса на передней оси и одно колесо на задней оси. Колеса транспортного средства приняты идентичными по размеру. Транспортное средство может также иметь центр тяжести (CG), который находится на или ниже плоскости перемещения.
Блок учитывает массу тела, аэродинамическое сопротивление, наклон дороги и распределение веса между осями из-за ускорения и профиля дороги. Опционально включают динамику тангажа и подвески. Транспортное средство не перемещается вертикально относительно земли.
Блок имеет опцию включения заданной извне массы и заданной извне инерции. Масса, инерция и центр тяжести кузова транспортного средства могут варьироваться в течение симуляции в ответ на изменения системы.
Оси транспортного средства параллельны и образуют плоскость. Продольное, x, направление лежит в этой плоскости и перпендикулярно осям. Если транспортное средство двигается по наклонному углу, β нормальное, z, направление не параллельно гравитации, но всегда перпендикулярно продольной плоскости оси.
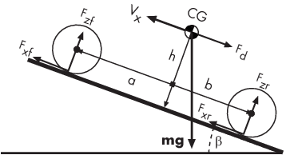
Этот рисунок и таблица определяют переменные модели движения транспортного средства.
Динамика аппарата и движение
Переменные модели транспортного средства
| Символ | Описание |
|---|---|
| g | Ускорение свободного падения |
| β | Угол наклона |
| m | Масса транспортного средства |
| h | Высота транспортного средства центра тяжести (CG) над землей |
| a, b | Расстояние между передней и задней осями, соответственно, от точки нормальной проекции CG транспортного средства до плоскости общей оси |
| Vx | Скорость транспортного средства. Когда Vx > 0, транспортное средство движется вперед. Когда Vx < 0, транспортное средство движется назад. |
| Vw | Скорость ветра. Когда Vw > 0, ветер встречный. Когда Vw < 0, ветер попутный. |
| n | Количество колес на каждой оси |
| Fxf, Fxr | Продольные силы на каждом колесе в передней и задней точках контакта с землей, соответственно |
| Fzf, Fzr | Нормальные силы нагрузки на каждое колесо в передней и задней точках контакта с землей, соответственно |
| A | Эффективная площадь поперечного сечения лобового транспортного средства |
| Cd | Коэффициент аэродинамического сопротивления |
| ρ | Массовая плотность воздуха |
| Fd | Аэродинамическая сила сопротивления |
Движение транспортного средства является результатом чистого эффекта всех сил и крутящих моментов, действующих на него. Продольные усилия шин толкают транспортное средство вперед или назад. Весовая mg транспортного средства действует через его центр тяжести (CG). В зависимости от угла наклона, вес тянет транспортное средство к земле и тянет его назад или вперед. Двигается ли транспортное средство вперед или назад, аэродинамическое сопротивление замедляет ее вниз. Для простоты, перетаскивание принято, чтобы действовать через CG.
Нулевое нормальное ускорение и крутящий момент нулевого тангажа определяют нормальную силу на каждом переднем и заднем колесе.
Нормальные силы колеса удовлетворяют .
Если вы включаете заданную извне массу или инерцию, уравнения смещаются на взвешенное значение входа.
Ускорение тангажа зависит от трех компонентов крутящего момента и инерции транспортного средства:
Где:
ɑ - ускорение тангажа.
f - продольная сила.
h - высота центра тяжести при измерении параллельно оси z.
J - инерция.
Если вы выбираете линейную модель для жесткости и демпфирования подвески, блок использует малое угловое приближение для вычисления тангажа. Если вы выбираете модель поиска таблицы, блок использует векторы, которые вы задаете, вычисляют динамику тангажа. Для жёстких упоров см. Translational Hard Stop.
Используйте вкладку Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
В отличие от параметров блоков, переменные не имеют условной видимости. На вкладке Variables перечислены все существующие основные переменные. Если переменная не используется в наборе уравнений, соответствующих выбранному строению блока, значения, заданные для этой переменной, игнорируются.
Блок Vehicle Body позволяет моделировать только продольную динамику, параллельную земле и ориентированную вдоль направления движения. Транспортное средство принято в тангаже и нормальном равновесии. Блок не моделирует тангаж или вертикальное движение. Таким образом, уравнения предполагают, что колеса никогда не теряют контакт. Это ограничение может привести к отрицательным нормальным силам.
Tire (Friction Parameterized) | Tire (Magic Formula) | Tire (Simple) | Tire-Road Interaction (Magic Formula) | Translational Hard Stop




