В этом примере вы связываете две инерции вращения. В первом соединении инерция вращается с той же скоростью вращения вдоль одного вала (оси привода). Затем инерция вращается с различными скоростями, когда они вращаются вдоль двух валов и соединяются шестерней. Наконец, инерция соединена шестерней и приводится в действие внешним крутящим моментом, так что они вращаются с различными скоростями и испытывают различные крутящие моменты. Для каждой модели в примере используются основные Simscape™ механические блоки и блоки Simscape Driveline™, такие как Inertia, Simple Gear и Solver Configuration.
Создайте первую версию самой простой, нетривиальной модели привода, две инерции, вращающиеся вместе вдоль одной оси. Откройте Simscape Driveline, Simscape и Simulink® библиотеки блоков и новое окно модели Simulink.
Перетащите в окно модели два блока Inertia, два Ideal Rotational Motion Sensor, два Mechanical Rotational Reference и два PS-Simulink Converter.
Из библиотеки Утилиты перетащите блок Solver Configuration. Каждая топологически отличная блок-схема привода требует только одного образца этого блока.
Из библиотеки Simulink перетащите мышью возможности, Mux и две пары блоков Goto и From. Соедините блоки как показано на следующих рисунках. Подсистемы датчика расположены иерархически.
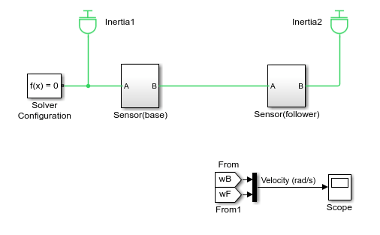
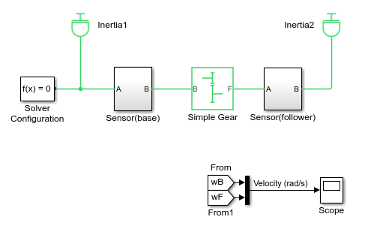
Модель с двумя инерциями вращения
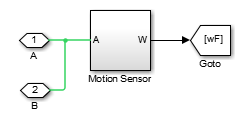
Подсистема датчиков
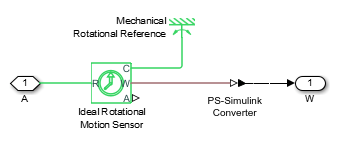
Подсистема датчика движения
В начале симуляции, поскольку демпфирования нет, инерция вращается с заданной начальной скоростью. Линия соединения между двумя блоками Inertia требует, чтобы они имели одинаковую скорость вращения. Чтобы задать начальную скорость вращения, откройте каждый Inertia блок. На вкладке Variables установите флажок Rotational velocity и установите параметр Value равным pi radians/second (рад/с).
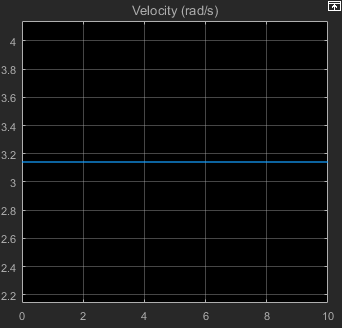
Откройте блок Scope и запустите симуляцию. Две скорости вращения постоянны в 3,14 радиан/секунду.
Измените модель, которую вы создали, связав две инерции вращения с простой, идеальной передачей с фиксированным передаточным числом.
Из библиотеки блоков Simscape Driveline перетащите блок Simple Gear в модель. Откройте блок. Измените значение передаточного числа по умолчанию для основания последующего устройства на 1. Измените меню Output shaft rotates на In same direction as input shaft и нажмите OK. Затем простая передача представляет собой два зубчатых колеса, вращающихся вместе с одной скоростью в одном направлении, причем одно колесо находится внутри другого. Соедините блоки как показано на следующем рисунке.
Модель с двумя инерциями вращения, соединенными передачей
Оставьте начальные скорости вращения на pi в блоках Inertia.
Откройте возможности и запустите симуляцию. Две скорости вращения постоянны в 3,14 радиан/секунду для обеих Инерций.
Измените меню Output shaft rotates на In opposite direction to input shaft. Затем простая передача становится двумя колесами, вращающимися вместе в противоположных направлениях, причем два колеса зацеплены на соответствующих внешних поверхностях. Измените начальную скорость в Inertia2 на -pi.
Перезапустите симуляцию. Две скорости вращения 3,14 и -3,14 радиан/секунду для Inertia1 и Inertia2, соответственно. Вторая скорость вращения одинаковая, но с противоположным знаком, потому что два тела вращаются в противоположных направлениях.
Снова измените меню Output shaft rotates на In same direction as input shaft.
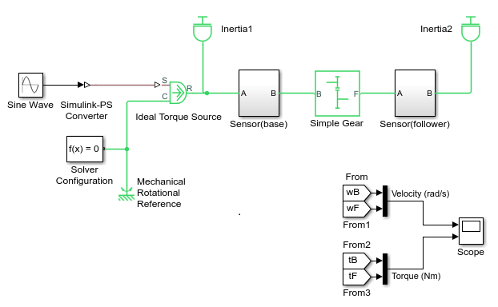
В окончательной версии модели простой передачи вы приводите в действие инерцию с внешним крутящим моментом вместо того, чтобы начинать их с фиксированными начальными скоростями вращения. Внешний крутящий момент изменяется синусоидально. Вы можете найти завершенную версию этой модели в sdl_gear пример модели.
Из библиотеки Simscape Foundation скопируйте Ideal Torque Source и два блока Ideal Torque Sensor, плюс блок Simulink-PS Converter и другой блок Mechanical Rotational Reference. Из библиотеки Simulink перетащите мышью блок Sine Wave и еще две пары блоков Goto и From.
Соедините блоки как показано на следующих рисунках. Подсистемы Датчика Крутящего Момента расположены параллельно с Подсистемами Датчика Движения внутри блоков Подсистемы Датчика. Установите начальные скорости обеих Инерций в нуль. Измените значение передаточного числа по умолчанию для основания последующего устройства на 2. Измените блок Scope, чтобы добавить другую ось для измерения крутящих моментов. Соедините другие блоки как показано на рисунке.
Модель с двумя инерциями вращения, связанными передачей и приводимыми в действие с крутящим моментом
Обновленная подсистема датчика
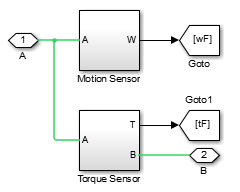
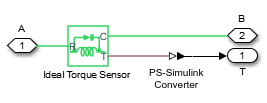
Подсистема датчика крутящего момента
Откройте блок Scope и запустите симуляцию.
Измеренные крутящие моменты и скорости вращения изменяются синусоидально. Как и в предыдущих моделях, скорость вращения Inertia2 вдвое меньше, чем у Inertia1. Крутящий момент на втором (последующем) валу в два раза больше, чем на первом, как того требуют законы зубчатой муфты.
Для блока Simple Gear измените меню Output shaft rotates на In opposite direction to input shaft и перезапустите симуляцию. Такие же скорости вращения и крутящие моменты приводят к тому, что значения, сопоставленные с Inertia2 и вторым валом, отрицательны, потому что второй корпус и второй вал вращаются в противоположных направлениях.
Механический датчик и исходные блоки, которые вы используете в предыдущих моделях, иллюстрируют их двойственную природу. Они сами выступают в качестве компонентов привода, но также позволяют вводить и извлекать физические сигналы, связанные с движением и крутящим моментом, включая соответствующие физические единицы измерения. Можно использовать эти физические сигналы с другими блоками в среде физического моделирования Simscape или преобразовать их в безразмерные сигналы Simulink для использования в нефизической части вашей модели. И сенсорный, и исходные блоки имеют пары механических портов и соединены последовательно с линиями физического соединения или через них.
Механический датчик и исходные блоки имеют как порты механического сохранения, так![]() и порты физического сигнала.
и порты физического сигнала.![]()
Многие блоки Simscape Driveline также имеют смесь механических портов и портов физического сигнала.
Ideal Torque Source инжектирует крутящий момент вдоль линии привода или последовательно с ней. Идеальный Датчик Крутящего Момента измеряет крутящий момент, протекающий вдоль линии привода или последовательно с ней.
Идеальный Датчик Вращательного Движения сообщает о различии между движениями в двух своих портах соединения.
Чтобы извлечь абсолютное движение в его порту R, соедините порт C с механическим эталонным блоком, который основывает этот порт на нулевом движении.
