Этот пример показывает, как изменять условия на дороге в течение симуляции 4-колесного испытательного места транспортного средства. Модель является версией sdl_vehicle_4wd_testbed, которая обновляется, чтобы включать Road Profile блоков как для передней, так и для задней шин. Когда транспортное средство перемещается, параметры оси и положение центра тяжести (CG) определяют положение передней и задней осей. Блоки Road Profile используют положения осей, чтобы определить коэффициенты трения транспортного средства угла и шин на основе заданных вами параметров.
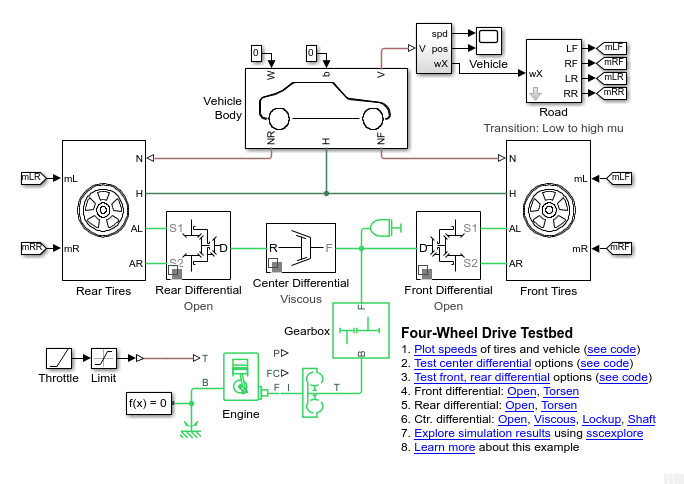
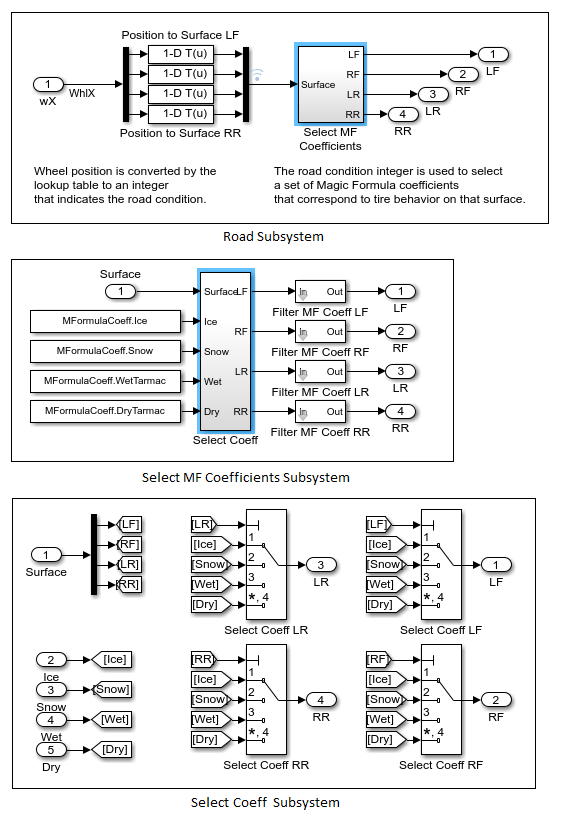
Исходная модель определяет коэффициенты магической формулы на основе положения транспортного средства относительно его положения в начале симуляции. Рисунки показывают оригинал и обновленные модели.
Новая модель включает Road Profile блоков как для правой, так и для левой шин. Чтобы открыть модель, в командной строке MATLAB введите
open_system('sdl_vehicle_road_4wd_testbed')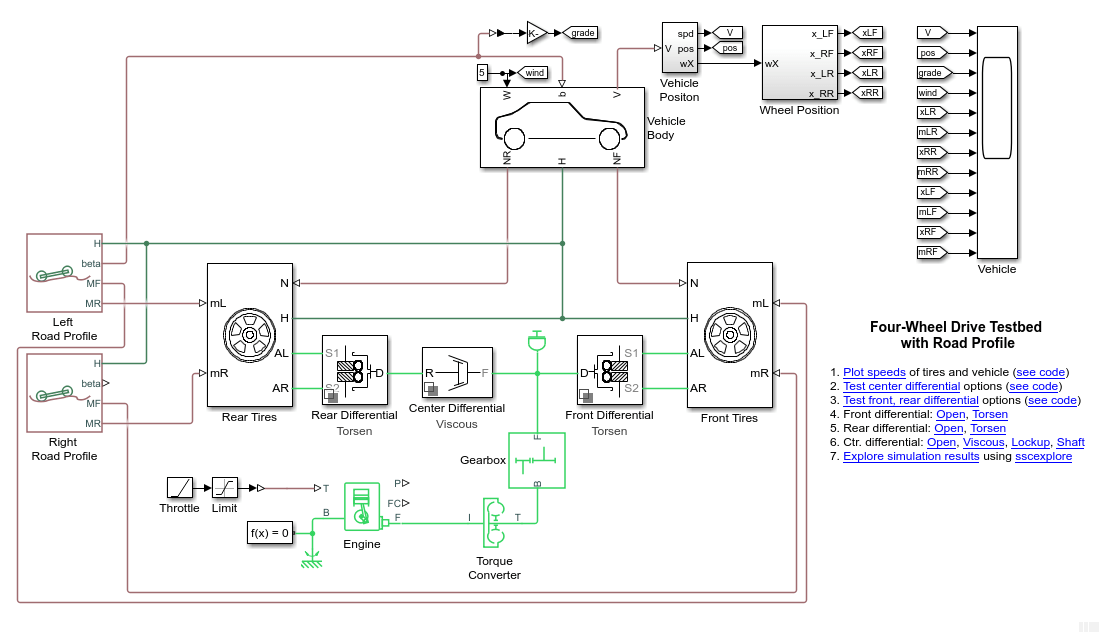
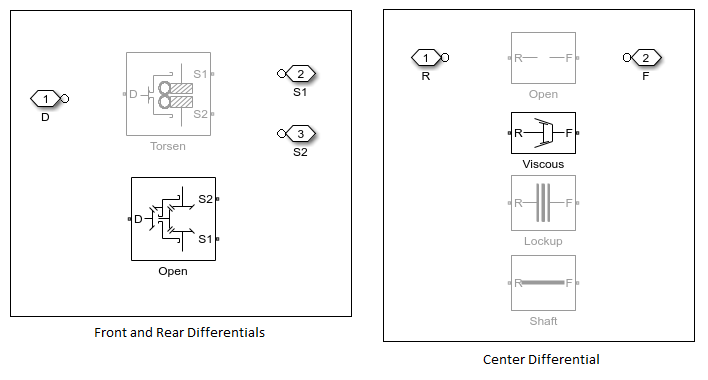
В обеих моделях передняя, задняя и центральная дифференциалы представлены вариантными подсистемами.
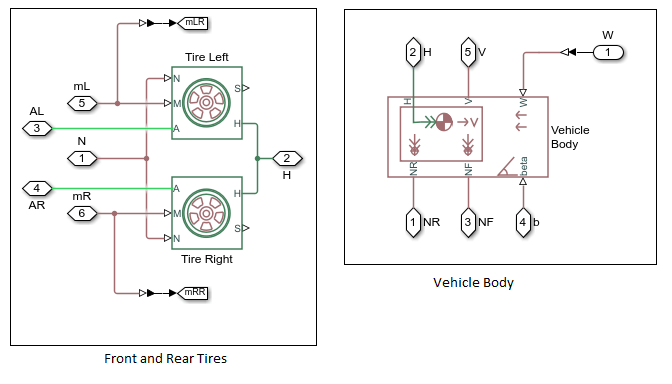
Подсистемы передней и задней шин содержат Tire (Magic Formula) блоков, в то время как подсистема Vehicle Body является маской для блока Vehicle Body.
Обновления, которые позволяют модели определять условия дорожного движения с помощью блоков Road Profile:
Замена подсистемы Road на подсистему Wheel Position. Дорожная подсистема содержит три уровня подсистем, которые модель использует для определения коэффициентов Магической Формулы для шин во время симуляции.
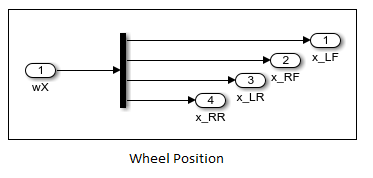
Сложение блоков Road Profile позволяет заменить Wheel Position систему на намного более простую подсистему Wheel Position. Новая подсистема демуксирует сигналы положения колеса.
Параметризация для добавленных блоков Road Profile для правой и левой шин:
Главный
Horizontal distance from CG to front axle — x_f
Horizontal distance from CG to rear axle — x_r
Horizontal distance for vertical profile — x_height_vector
Vertical profile — height_vector
Трение
Friction output — Physical signal Magic Formula coefficients
Horizontal distance for friction profile — x_friction_vector
Magic Formula coefficients for front axle — MF_M_matrix
Magic Formula coefficients for front axle — MR_M_matrix
Переменная положения
Override - выбрать
Beginning Value — x_0
Vehicle Body блока Main обновления параметра:
Horizontal distance from CG to front axle — x_f
Horizontal distance from CG to rear axle — x_r
Определения переменных для модели:
x_f=1.4; x_r=1.6; x_height_vector=[-10, 0, 10]; height_vector=[0, 0, 0.25]; x_friction_vector = [ -10, 5, 10, 15 ]; MF_M_matrix = [10 1.9 1 0.97;... 4 2 0.1 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; MR_M_matrix = [10 1.9 1 0.97;... 12 2.3 0.82 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; x_0 = 0;
Дополнительные экологические обновления:
Блок Road Profile левой шины вводит переменный уровень дороги. Блок Gain преобразует переменную уклона, beta из радианов в степени.
Встречный ветер включается при помощи ненулевого значения для блока Constant.
Обновление блока сигнала:
Outports и Inports блоки заменяются блоками Connection Port.
Goto и From блоки используются для передачи сигналов на Scope.
Визуализация данных и обновление журналов:
Блок Scope обновляется, чтобы показать положения шин, коэффициенты Magic Formula, встречный ветер и повышение дороги.
Имя журнала моделирования обновляется так, чтобы оно совпадало с именем обновленной модели.
Дифференциальный тест и код генерации графика обновляются, чтобы использовать новое имя журнала симуляции.
Чтобы запустить симуляцию и сгенерировать график результатов, нажмите Plot speeds.
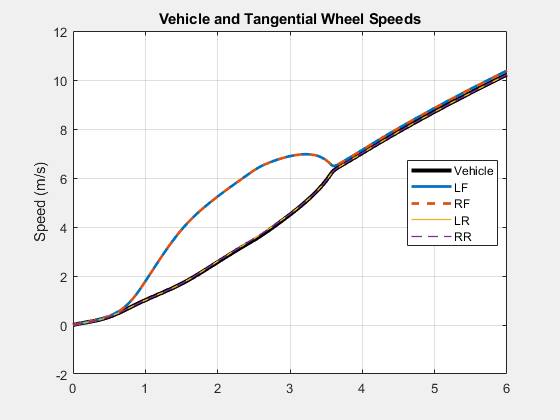
Передние шины испытывают скольжение в середине симуляции из-за скользких условий, связанных с [4 2 0.1 1] Магические Коэффициенты, которые использует симуляция, когда положения передних шин находятся в 5-10 метрах от исходных положений.
Чтобы увидеть, как наклон дороги, встречный ветер, положение шины и скорость и положение транспортного средства связаны друг с другом и с Магическими Коэффициентами, откройте блок Scope.
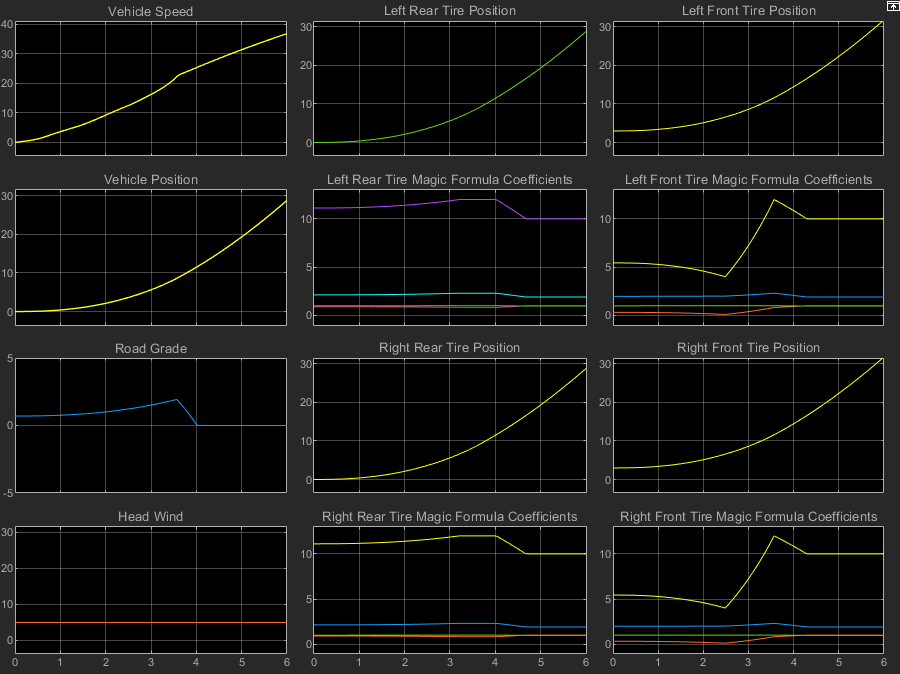
Скорость транспортного средства незначительно увеличивается при уменьшении уровня дороги.
Чтобы протестировать переднюю и заднюю дифференциалы в вариантах Open и Torsen, нажмите Test front, rear differential.
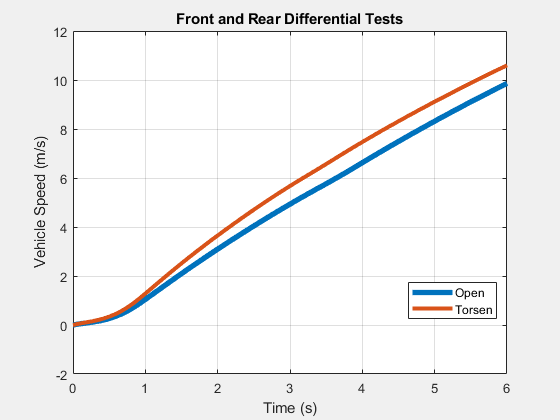
Дифференциальное строение Торсена приводит к более высокой скорости во время симуляции.
Чтобы протестировать все варианты центрального дифференциала, нажмите Test center differential.
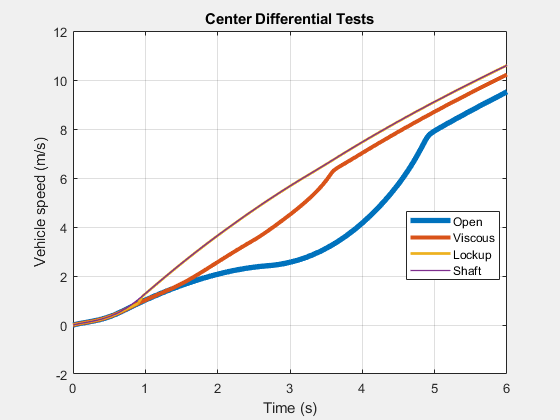
Открытые и вязкие дифференциальные строения приводят к более низкой, более переменной скорости, когда степень изменяется во время симуляции.
Road Profile | Tire (Friction Parameterized) | Tire (Magic Formula) | Tire-Road Interaction (Magic Formula) | Vehicle Body
