Кинематическое ограничение между началом системы координат и изогнутым путем
Simscape/Multibody/Ограничения

Блок Point on Curve Constraint ограничивает точку кривой. Система координат, присоединенная к точке, может свободно вращаться в зависимости от других ограничений в модели. Используйте блок Point on Curve Constraint для моделирования ограничений «точка на кривой», таких как ограничение между роликовыми горками и дорожкой или кулачком и кулачком.
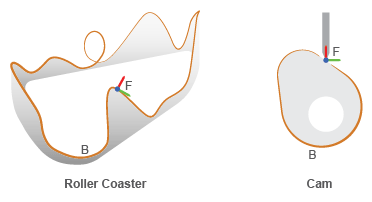
Блок Point on Curve Constraint имеет два порта: F и B. Порт F является портом системы координат, источник которого соответствует точке. Порт B является геометрическим портом, который вы соединяете с кривой. Избегайте кривых с резкими изменениями уклона, так как они могут вызвать проблемы симуляции.
Можно использовать этот блок, чтобы определить силы ограничений и крутящие моменты между точкой и кривой. На основе настройки параметра Resolution Frame, блок разрешает силы и крутящие моменты в базе или последующей системе координат.

