В системах с обратной связью соединения и ограничения должны быть взаимно совместимыми. Для примера в четырехзвенник все шарниры вращения должны вращаться вокруг параллельных осей. Если одно из соединений вращается вокруг другой оси, сборка прекращает работать, и модель не моделируется.
Чтобы упростить процесс устранения неполадок, Simscape™ Multibody™ предоставляет Model Report. Этот инструмент помогает определить соединения и ограничения, которые привели к ошибке сборки. Если вы идентифицируете эти соединения и ограничения, можно затем определить, какие из их систем координат исправить - и как их исправить.
В этом примере вы идентифицируете источник ошибок сборки в модели механизма прицеливания с помощью отчета модели. Затем, используя Mechanics Explorer, вы определяете, как исправить этот источник ошибки. The sm_dcrankaim_assembly_with_error рекомендуемый пример предоставляет базис для этого примера.
Чтобы открыть модель, в MATLAB® в командной строке введите sm_dcrankaim_assembly_with_error. Модель откроется в новом окне.
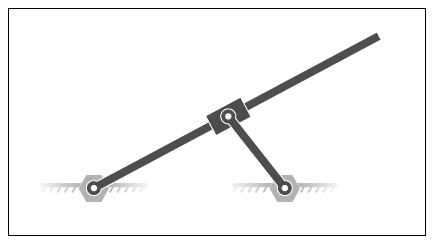
Рисунок показывает схему системы, которую представляет модель. Эта система содержит четыре тела, помеченные A-D. Эти тела соединяются в замкнутом цикле через четыре соединения, маркированные Ri, Ro, Rg и Pg. При соединении друг с другом эти компоненты образуют систему с одной степенью свободы.

Модель представляет компоненты этой системы, используя блоки. Каждый блок представляет физический компонент. Блок World Frame обеспечивает конечную систему отсчета в модели. Рисунок показывает блок, которую модель использует, чтобы представлять механизм двухкранового прицеливания.
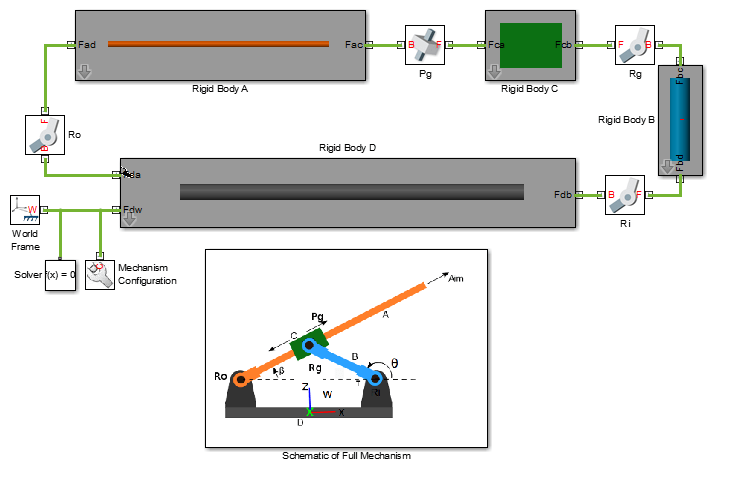
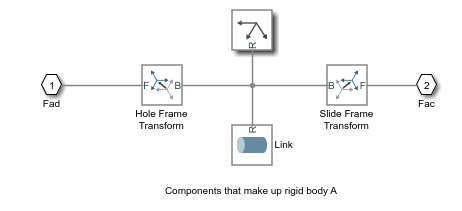
Чтобы представлять тела, модель содержит четыре блока подсистемы, помеченные как Твердое Тело A-D. Каждая подсистема содержит один Cylindrical Solid блок и несколько Блоки Твердого Преобразования. Блок Cylindrical Solid обеспечивает геометрию, инерцию и цвет подсистемы тела. Блоки Rigid Transform обеспечивают системы координат, к которым вы соединяете соединения. Блок системы координат идентифицирует конечную систему отсчета в блоке подсистемы.
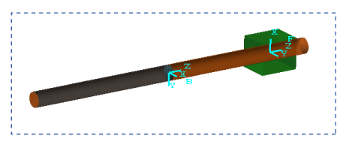
Модель помечает подсистему тела блоками Твердое Тело A-D. Чтобы изучить блок-схему подсистемы тела, щелкните правой кнопкой мыши блок подсистемы и выберите Mask > Look Under Mask. Рисунок показывает блок Твердого Тела А.
Чтобы представлять соединения, модель содержит четыре блока соединений. Три соединения обеспечивают одну вращательную степень свободы между парой тел. Каждое из этих соединений представлено с Revolute Joint блоком. Четвертое соединение обеспечивает одну поступательную степень свободы между парой тел. Вы представляете это соединение с Prismatic Joint блоком. Модель помечает вращение блоков соединений Ro, Rg и Ri, и призматический блок соединений Pg.
Как следует из имени модели, эта модель содержит ошибку. Ошибка препятствует успешной сборке модели, что приводит к сбою симуляции. Чтобы обновить модель и исследовать ошибку сборки:
На вкладке Modeling нажмите Update Model.
В Mechanics Explorer откроется статическое отображение вашей модели в ее начальном состоянии. Поскольку модель содержит ошибку сборки, Simscape Multibody выдает сообщение об ошибке. Пока игнорируйте это сообщение.
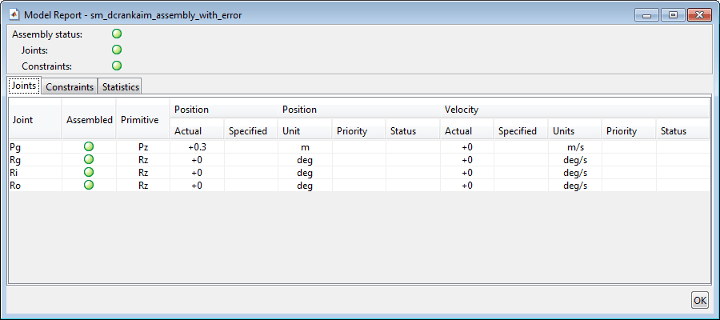
Mechanics Explorer предоставляет доступ к Model Report, утилите Simscape Multibody, которая суммирует статус сборки каждого соединения и ограничение в модели. Откройте эту утилиту, чтобы определить, какое соединение не удалось собрать. Для этого в панели меню Mechanics Explorer выберите Tools > Model Report.
Отчет по модели откроется в новом окне. Красный квадрат указывает, что модель, как и ожидалось, не смогла собраться. Второй красный квадрат указывает, что несобранное соединение Pg является единственным фактором, способствующим ошибке сборки блока. Эта информация позволяет вам сконцентрировать усилия по устранению неполадок на небольшой области блок-схемы, которая окружает блок соединений.
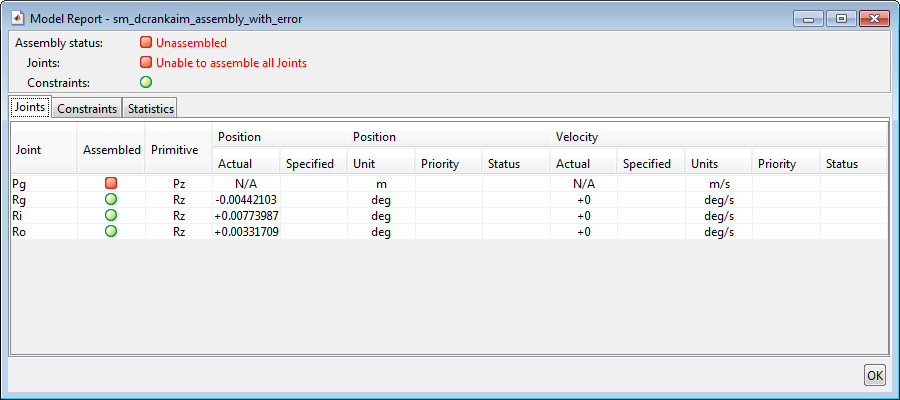
Сообщение об ошибке, выданное Simscape Multibody во время обновления модели, идентифицирует нарушение положения как первопричину отказа сборки. Это предполагает, что системы координат, соединенные соединением Pg, неправильно выровнены. Чтобы подтвердить эту гипотезу, проверьте ориентацию этих систем координат в Mechanics Explorer.
На панели дерева Mechanics Explorer выберите Pg.

На панели визуализации Mechanics Explorer исследуйте положение и ориентацию подсвеченных систем координат. Это системы координат, которые появляются в светло-бирюзово-синем цвете.
Две системы координат смещены вдоль оси Z. Это смещение верно, поскольку соединение Pg содержит призматический примитив, выровненный по оси Z, обеспечивающий системы координат с одной поступательной степенью свободы вдоль этой оси. Однако две системы координат также вращаются относительно друг друга вокруг общей оси Z. Это смещение недопустимо, поскольку соединение Pg не содержит Вращательного или Сферического примитивов, и, следовательно, никаких вращательных степеней свободы вокруг любой оси. Чтобы исправить ошибку сборки блока, необходимо повернуть любую из двух систем координат так, чтобы все их оси были параллельны друг другу.
В этом примере вы применяете преобразование поворота к последующей системе координат так, чтобы ее оси лежали параллельно осям базовой системы координат. Кроме того, можно применить эквивалентное преобразование поворота к базовой системе координат. Этот шаг позволяет соединению Pg, и, следовательно, самой модели, успешно собраться.
В древовидной панели Mechanics Explorer щелкните правой кнопкой мыши узел Pg и выберите Go To Block. Simscape Multibody выводит блок-схему на передний план и подсвечивает блок Pg.
Щелкните правой кнопкой мыши блок Подсистемы Твердого Тела C и выберите Mask > Look Under Mask.
Дважды кликните блок Slide Frame Transform и выберите новые значения параметров, которые предоставляет таблица. Выберите OK.
| Параметр | Новое значение |
|---|---|
| Rotation> Pair 2> Follower | +X |
| Rotation> Pair 2> Base | +Y |
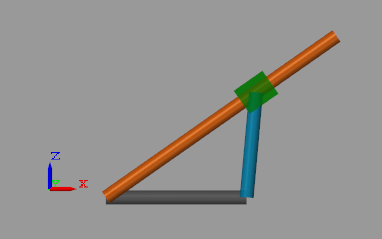
Теперь можно симулировать модель. В Mechanics Explorer откроется 3-D анимация вашей модели. Рисунок показывает снимок анимации. Вращайте, катите, панорамируйте и масштабируйте, чтобы исследовать.
Можно использовать инструмент Отчет модели (Model Report), чтобы проверить статус сборки. Для этого в панели меню Mechanics Explorer выберите Tools > Model Report. В отчете модели проверьте, что значки состояния сборки для модели и ее соединений являются зелеными кругами. Зеленые круги указывают, что модель собралась правильно.