Можно использовать гибкие блоки балок в Simscape™ Multibody™, чтобы смоделировать стройные тела с постоянными поперечными сечениями, которые могут иметь небольшие и линейные упругие деформации. Эти деформации включают удлинение, изгиб и кручение. Использовать эти блоки, в Library Browser, Simscape нажатия кнопки> Multibody> Body Elements> Flexible Bodies> Beams.
Следующий рисунок показывает гибкую модель канального луча. В этом примере балка подвергается и изгибу, и кручению под приложенной поперечной точечной нагрузкой. Степень, до которой повороты и скручиваются балка, изменяется с точкой приложения силы в плоскости поперечного сечения. Введите smdoc_flexible_cantilever_channel в MATLAB® командная строка для открытия модели.
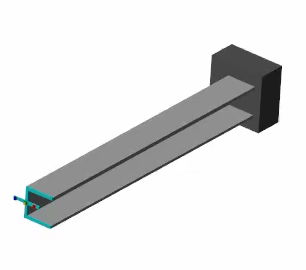
Геометрия балки является выдавливанием ее поперечного сечения. Общие сечения с отверстиями или без них поддерживаются блоком General Flexible Beam. Кроме того, поперечное сечение балки может иметь много стандартных форм, таких как канал, угол и полая цилиндрическая. Для балок со стандартными формами поперечного сечения используйте следующие гибкие блоки балок:
Flexible Cylindrical Beam (как сплошной, так и пустой)
Flexible Rectangular Beam (как сплошной, так и пустой)
Каждая балка имеет две соединительные системы координат, маркированные A и B. Каждая система координат соединения имеет порт системы координат на блоке, который может соединиться с другим блоком. Соединительные системы координат расположены в концах балки и падают на ось z локальной опорной системы координат, обозначенную R. Опорная рамка служит просто внутренней ссылкой для луча и не имеет порта системы координат.
В Simscape Multibody все гибкие балки могут иметь упругие изгибы, осевые и крутильные деформации. Балки приняты стройными телами, длина которых должна значительно превышать общие размерности поперечного сечения, а все деформации должны быть линейными и маленькими.
Изгиб и осевые деформации луча следуют классической (Эйлер-Бернулли) теории луча. Изгиб может быть выполнен вокруг любой оси в плоскости поперечного сечения (xy-плоскости) балки. Срезы в поперечном сечении приняты жесткими в плоскости, чтобы оставаться плоскими во время деформации и всегда быть перпендикулярными деформированной нейтральной оси балки. Скручивание балки происходит из теории кручения Сен-Венанта, и срезы поперечного сечения являются жесткими в плоскости, но свободны для деформации вне плоскости.
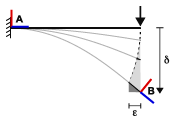
Когда одно или несколько из этих предположений не выполняются, результат может быть неточным. Например, на рисунке консольная балка, которая подвергается поперечной точечной нагрузке, получит неточный результат, когда деформация изгиба, δ, является большой. Во время изгиба свободный конец балки движется вниз перпендикулярно вместо следования истинному физическому пути, что обозначено пунктирной траекторией. Расхождение, ε, увеличивается с увеличениями δ.
Гибкие лучи в Simscape Multibody приняты из однородного, изотропного и линейно упругого материала. Можно задать свойства материала, такие как плотность и модуль Юнга, в Stiffness and Inertia разделе диалогового окна блока. Свойства поперечного сечения балки, такие как осевая, изгибная и кручение, автоматически вычисляются блоком с помощью заданных вами свойств материала и геометрии. Чтобы увидеть вычисленные значения, в диалоговом окне блока балки откройте Stiffness and Inertia > Derived Values и нажмите кнопку Update.
Блоки балки поддерживают два метода демпфирования: равномерное модальное демпфирование и пропорциональное демпфирование. Метод равномерного модального демпфирования применяет одинаковые коэффициенты затухания ко всем режимам вибрации луча. В пропорциональном методе демпфирования демпфирующая матрица [C] является линейной комбинацией большой матрицы [M] и матрицы жесткости [K]:
,
где α и β являются скалярными коэффициентами.
Параметр Number of Elements в Discretization разделе диалогового окна блока балки задает количество конечных элементов, используемых для дискретизации балки. Можно выбрать его значение, чтобы получить хороший компромисс между точностью симуляции, которая может потребовать больше элементов, и скоростью симуляции, которая требует меньше элементов. Используйте наименьшее количество элементов, необходимых для удовлетворения ваших требований к точности.
Для деформаций изгиба блоки пучка используют кубический метод интерполяции Гермита, чтобы вычислить распределения перемещений по каждому элементу. Распределения осевого смещения и кручения получаются методом линейной интерполяции.
При использовании блоков луча в модели несколько факторов влияют на точность и скорость эффективности симуляции. В этом разделе рассматривается влияние трех наиболее важных факторов: гибкое использование луча, выбор решателя и настройки демпфирования.
Даже при том, что использование гибких пучков может увеличить точность симуляции мультитела, гибкие пучки, как правило, замедляют его, увеличивая числовую жесткость и количество степеней свободы системы. Чтобы ускорить симуляцию, вы должны использовать твердое тело, когда деформация тела незначительна. Более того, параметр Number of Elements в разделе Discretization сильно влияет на эффективность симуляции. Для получения дополнительной информации см. раздел Дискретизация.
Решатель критичен для эффективности симуляции мультитела. Жесткие решатели, такие как ode15s, ode23t или daessc, имеют тенденцию работать лучше для систем с гибкими балками из-за жесткого характера этих систем. Кроме того, допуски решателя и максимальный порядок также влияют на точность и скорость симуляции. Для получения дополнительной информации см. раздел Выбор решателя.
Примечание
Все решатели, кроме ode23t, обеспечивают некоторый уровень численного рассеяния, что может быть полезно для моделирования гибких систем мультитела.
При моделировании гибкого луча с небольшим демпфированием или без него нежелательные высокочастотные режимы в отклике могут замедлить симуляцию, если решатель еще не обеспечивает адекватное численное рассеивание. В этом случае добавление небольшого количества демпфирования может улучшить скорость симуляции, не оказывая существенного влияния на точность модели.
Гибкие лучи в Simscape Multibody реагируют на силу тяжести, но только ту, которая задана в блоке Mechanism Configuration. Сила, вызванная блоком Gravitational Field, игнорируется. Если сеть систем координат, частью которой является блок гибких балок, содержит блок Gravitational Field, то тело ведет себя как будто в невесомости. Использование гибких блоков тела и Gravitational Field в одной сети систем координат заставляет Diagnostic Viewer выдавать предупреждение компиляции.
Примечание
Моделирование гравитации как с Mechanism Configuration, так и с Gravitational Field блоками приводит к ошибке компиляции.
Диалоговое окно каждого блока гибких балок содержит сводную панель визуализации. Эта панель обеспечивает мгновенную визуальную обратную связь по лучу, который вы моделируете. Используйте его, чтобы найти и исправить любые проблемы с сечением, длиной и цветом балки. Можно изучить балку с различных видов путем выбора стандартного вида или путем поворота, панорамирования и масштабирования.
На панели визуализации панели инструментов нажмите кнопку Update Visualization![]() , чтобы просмотреть последние изменения балки. Щелкните Apply или OK, чтобы зафиксировать любые изменения в модели.
, чтобы просмотреть последние изменения балки. Щелкните Apply или OK, чтобы зафиксировать любые изменения в модели.
Примечание
Можно указать на любую кнопку, чтобы увидеть ее функцию.
Кроме того, можно щелкнуть правой кнопкой мыши панель визуализации для контекстно-зависимого меню. В этом меню предусмотрены дополнительные опции для изменения цвета фона, изменения настройки вида представления и разделения панели визуализации на несколько окон, в которых отображаются различные виды балки.
