Узлы передач повсеместно используются во вращающихся машинах. Они появляются в муфтах и приводах, часто как зубчатые передачи, где передают крутящий момент в соотношении или под углом между движущимися контактирующими телами. Некоторые, как и блоки реечного механизма, служат специальным целям, таким как преобразование между вращательным и поступательным движениями.
Передачи в автомобильном дифференциале
Кинематика передач в mesh возникает из-за того, что в вычислительных терминах являются алгебраическими ограничениями между вращениями передач. Зубья зубьев не могут физически перекрываться, и передачи должны в точке контакта, известной как точка тангажа, перемещаться с той же мгновенной линейной скоростью.
Блоки ограничений передачи захватывают эффекты этих ограничений в модели. Блоки, найденные в библиотеке Gears and Couplings > Gears, включают:
Bevel Gear Constraint - Соедините две передачи, обычно конические в поперечном сечении, с пересекающимися осями вращения, сходимыми под прямым или общим углом. Конические зубчатые узлы распространены в ходовых частях винтокрылых машин, где передают крутящий момент между валами ротора, установленными под углом.
Common Gear Constraint - соедините две передачи, обычно цилиндрические в поперечном сечении, с внутренней или внешней сеткой и осями параллельного вращения. Общие зубчатые узлы появляются в автомобильных трансмиссиях, часто в виде планетарных передач, которые передают степень от двигателя к колесам при заданных коэффициентах крутящего момента.
Rack and Pinion Constraint - Соедините вращающуюся шестерню с поступательной рейкой с соответствующими осями движения, обращенными под прямым углом. Реечные узлы распространены в системах степени руля, где они преобразуют вращение руля в перемещение тяг, заставляя рулевые рычаги и колеса поворачиваться.
Worm and Gear Constraint - Связать червь и передачу с непересекающимися осями вращения, обращенными под прямым углом. Червячно-зубчатые узлы формируют основу встроенных в солнечные трекеры приводов, которые предназначены для следования за солнцем и максимизации интенсивности солнечного света, поражающего массив солнечных панелей.
С топологической точки зрения зубчатые узлы образуют замкнутые кинематические цепи, или циклы. Простой цикл содержит две или более передачи - термин, используемый здесь свободно, чтобы включать черви, шестерни и рейки - и фиксатор, чтобы удерживать передачи. Передачи соединяются на одном конце с фиксатором через соединения, а на другом конце друг с другом через ограничение передачи.
Простая зубчатая кинематическая цепь
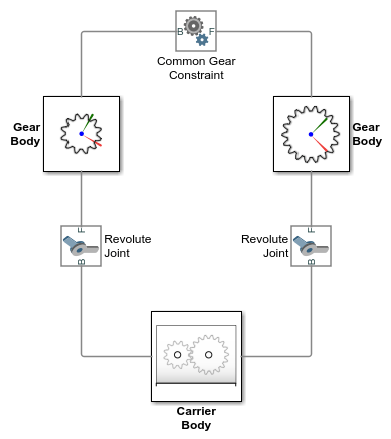
Соединения определяют степени свободы, доступные шестерням, прежде чем они будут введены в mesh. Степени свободы кодируют типы движения, к которым способны передачи, и соответствующие оси движения. Ограничение передачи связывает передачи так, что они перемещаются как бы в mesh с отношением скорости, определенным из радиусов передачи (тангажа) или счетчиков зубьев.
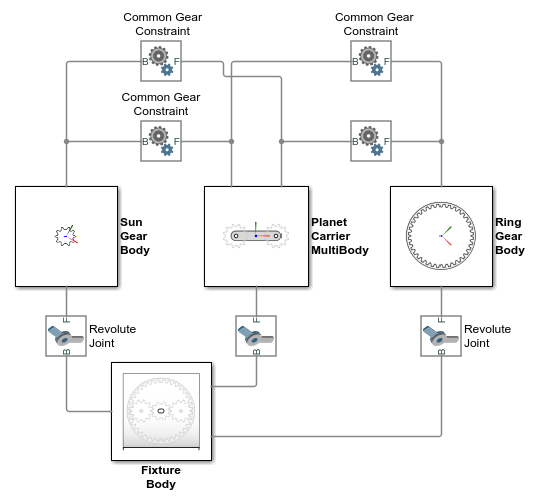
Возможны более сложные топологии модели. В планетарном train звонка передача добавляет в модель вторую кинематическую замкнутую цепь. Планетарные передачи, прикрепленные к носителю, добавляют еще больше кинематические замкнутые цепи. Тем не менее, независимо от того, насколько уникален зубчатый узел, модель должна по своей природе содержать, по меньшей мере, одну кинематическую замкнутую цепь.
Планетарная шестерня Кинематических замкнутых цепей
Ограничения на передачу накладывают особые ограничения на положения и ориентации систем координат зубчатых соединений. Эти ограничения являются сложением к ограничению зацепления, которое связывает движения передач вокруг соответствующих осей вращения и служит для обеспечения того, чтобы передачи всегда были расположены в mesh. Для примера блок Common Gear Constraint требует, чтобы:
Расстояние между z -осями будет равно расстоянию между центрами передач.
Начало последующей системы координат лежит на xy плоскости базовой системы координат.
z-оси основы и последующей системы координат указывают в одном направлении.
Блоки ограничений зубчатой передачи налагают ограничения на сборку, но только во время сборки блока, когда передачи впервые помещаются в mesh. Когда симуляция начинается, это задача модели, чтобы убедиться, что размещение передачи все еще удовлетворяет требованиям сборки. Блоки ограничений зубчатой передачи затем применяют ограничение зацепления, но просто контролируют ограничения сборки, чтобы убедиться, что передачи остаются в допустимом строении.
Для примеров, показывающих, как правильно разместить системы координат зубчатого соединения с помощью блоков Rigid Transform, смотрите:
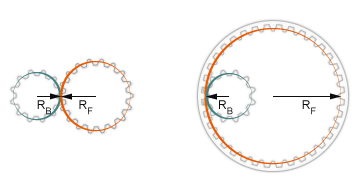
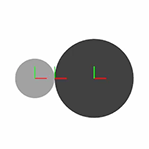
Ограничения передачи параметризованы с точки зрения размерностей окружности тангажа. Окружность тангажа является воображаемым кругом, концентрическим с шестерней или червяком и касательным к точке контакта зуба. Каждая передача и червь имеют круг тангажа. Рисунок показывает тангажу круги цилиндрических зубчатых колес с внешним и внутренним зацеплением. Параметры R B и R F обозначают радиусы тангажа передачи.
Можно аппроксимировать передачи, черви и стойки, используя стандартные твердые формы. Для передач и червей используйте цилиндры с радиусами, равными радиусам тангажа. Можно использовать конусы для конических передач и кирпичи для фигур стойки. Рисунок показывает пример с геометрией цилиндрической шестерни, приведенной к цилиндрам. Если вы новичок в моделировании тел с помощью стандартных твердых форм, см. «Модель простого звена».
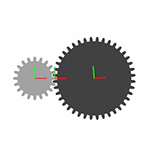
Для получения более подробной геометрии используйте блок Extruded Solid. Эта форма позволяет вам задать зубчатые формы поперечного сечения зубчатых колес и стойок. Вытесненный Твердый блок генерирует 3-D вытягивания путем протягивания поперечных сечений вдоль их нормальных осей. Рисунок показывает пример с геометрией цилиндрической шестерни, смоделированной как общие выдавливания. Пример, показывающий, как смоделировать простое тело с Extruded Solid блоком, см. в моделировании выдавливаний и вращений».
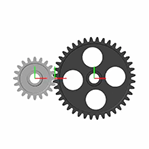
Для точных геометрий можно загрузить 3-D фигуры в блоки File Solid с помощью файлов STEP или STL. Вы должны получить файлы STEP или STL из внешних источников. Если у вас есть моделей передач, червей и стоек, вы можете экспортировать их в формате STEP или STL для использования в Simscape™ Multibody™ программном обеспечении. Рисунок показывает пример с геометрией цилиндрической передачи, импортированной из моделей CAD через файлы STEP.
Физические модели, обеспечиваемые блоками ограничений передачи, идеализированы. Трение передачи, инерция и люфт игнорируются. Вязкое демпфирование добавляется к валам зубчатых колес путем определения коэффициентов демпфирования в блоках соединений, которые представляют соединения валов. Блоки соединений валов обычно расположены между телами валов зубчатых колес и телом несущего колеса зубчатых колес. Инерцию зубчатых колес можно добавить путем моделирования зубчатых тел с помощью различных твердых блоков, Inertia или General Variable Mass блоков.
