Интегратор в дискретном времени или в непрерывном времени
Simscape/Электрический/Управление/Общее управление
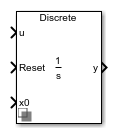
Блок Integrator (Discrete or Continuous) реализует простого интегратора в соответствии с IEEE 421.5-2016[1].
Можно переключаться между непрерывной и дискретной реализациями интегратора с помощью параметра Sample time.
Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time на 0. Это представление эквивалентно непрерывной передаточной функции:
Из предшествующей передаточной функции интегратор, определяющий уравнения, являются:
где:
u является входом интегратора.
x является состоянием интегратора.
y - выход интегратора.
t - время симуляции.
x0 - начальное состояние интегратора.
Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока. Дискретное представление эквивалентно передаточной функции:
где Ts - шаг расчета. Из дискретной передаточной функции уравнения интегратора задаются с помощью прямого метода Эйлера:
где:
u является входом интегратора.
x является состоянием интегратора.
y - выход интегратора.
n - временной шаг симуляции.
x0 - начальное состояние интегратора.
Можно задать начальные условия состояния с помощью x0 входного порта. Состояние интегратора возвращается к начальному условию в любое время сброса.
Можно ограничить интегральный выход одним из двух методов:
Установите Limit type значение Anti-windup для использования метода anti-windup насыщения.
Метод анти-насыщения ограничивает состояние интегратора x между нижним пределом насыщения A и верхним пределом насыщения B:
Поскольку состояние ограничено, выход может немедленно ответить на обращение входного знака, когда интеграл насыщен.
Установите Limit type значение Windup для использования метода насыщения обмотки.
Метод windup ограничивает выходную y интегратора между нижним пределом насыщения A и верхним пределом насыщения B:
Поскольку выход ограничен, состояние может продолжать расти, когда интегратор насыщен. В результате выход не может ответить на разворот входного знака, пока состояние не достигнет предельной точки насыщения.
Можно сбросить состояние интегратора, передав ненулевой сигнал к Reset порту блока.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
