Интегратор в дискретном или непрерывном времени с обернутым состоянием
Simscape/Электрический/Управление/Общее управление
Блок Integrator with Wrapped State (Discrete or Continuous) реализует интегратор обернутого состояния в соответствии с IEEE 421.5-2016[1].
Используйте этот блок для генерации периодических сигналов, таких как углы или для представления управляемого управляемым напряжением генератором. Можно переключаться между непрерывной и дискретной реализациями интегратора с помощью параметра Sample time.
Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time на 0. Это представление эквивалентно непрерывной передаточной функции:
Из предшествующей передаточной функции интегратор, определяющий уравнения, являются:
где:
u является входом интегратора.
x является состоянием интегратора.
y - выход интегратора.
t - время симуляции.
x0 - начальное состояние интегратора.
Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока. Дискретное представление эквивалентно передаточной функции:
где Ts - шаг расчета. Из дискретной передаточной функции уравнения интегратора задаются с помощью прямого метода Эйлера:
где:
u является входом интегратора.
x является состоянием интегратора.
y - выход интегратора.
n - временной шаг симуляции.
x0 - начальное состояние интегратора.
Можно задать начальные условия состояния с помощью Initial condition параметра.
Интегратор оборачивает свое состояние между заданными нижним и верхним значениями. Эта схема показывает выходы обернутого и не обернутого интегратора состояния для постоянного входа.
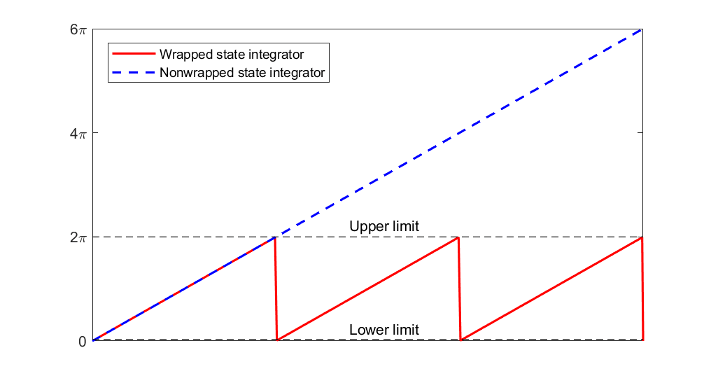
На схеме нижний и верхний пределы 0 и 2π, соответственно.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.


