Вычислите движение транспортного средства с помощью дифференциальной кинематической модели привода
Robotics System Toolbox/Алгоритмы мобильного робота
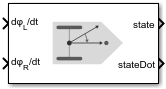
Блок Differential Drive Kinematic Model создает модель дифференциального привода автомобиля, чтобы симулировать упрощенную динамику аппарата. Эта модель аппроксимирует транспортное средство с одной фиксированной осью и колесами, разделенными заданной шириной пути Track width. Каждое из колес может вращаться независимо с помощью входов скорости, dphiL/dt и dphiR/dt, для левого и правого колес соответственно. Скорость и курс транспортного средства определяются из центра оси.
[1] Линч, Кевин М. и Фрэнк С. Парк. Современная робототехника: Механика, Планирование и Контроль 1 эд. Кембридж, Массачусетс: Cambridge University Press, 2017.

