Полосо-заграждающая фильтрация сигнала
y = bandstop(x,wpass)x использование полосно-заграждающего фильтра с частотой области значений заданной двухэлементным вектором wpass и выражены в нормированных модулях π рад/выборка. bandstop использует фильтр минимального порядка с затуханием в полосе задерживания 60 дБ и компенсирует задержку, введенную фильтром. Если x является матрицей, функция фильтрует каждый столбец независимо.
y = bandstop(___,Name,Value)
[ также возвращает y,d] = bandstop(___)digitalFilter d объекта используется для фильтрации входов.
bandstop(___) без выходных аргументов строит график входного сигнала и накладывает отфильтрованный сигнал.
Создайте сигнал, дискретизированный с частотой 1 кГц в течение 1 секунды. Сигнал содержит три тональных сигнала, один с частотой 50 Гц, другой с частотой 150 Гц и третий с частотой 250 Гц. Оба высокочастотных и низкочастотных тональных сигнала имеют удвоенную амплитуду промежуточного тонального сигнала. Сигнал встроен в Гауссов белый шум отклонения 1/100.
fs = 1e3; t = 0:1/fs:1; x = [2 1 2]*sin(2*pi*[50 150 250]'.*t) + randn(size(t))/10;
Полосно-стоповая фильтрация сигнала для удаления тонального сигнала средней частоты. Задайте частоты полосы пропускания 100 Гц и 200 Гц. Отображение исходных и фильтрованных сигналов, а также их спектров.
bandstop(x,[100 200],fs)
![Figure contains 2 axes. Axes 1 with title Bandstop Filtering (Fpass = [100 200] Hz) contains 2 objects of type line. These objects represent Original, Filtered. Axes 2 contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandstopFilteringOfTonesExample_01.png)
Реализуйте базовый синтезатор цифровой музыки и используйте его для воспроизведения традиционной песни. Задайте частоту дискретизации 2 кГц. Постройте спектрограмму песни.
fs = 2e3; t = 0:1/fs:0.3-1/fs; l = [0 130.81 146.83 164.81 174.61 196.00 220 246.94]; m = [0 261.63 293.66 329.63 349.23 392.00 440 493.88]; h = [0 523.25 587.33 659.25 698.46 783.99 880 987.77]; note = @(f,g) [1 1 1]*sin(2*pi*[l(g) m(g) h(f)]'.*t); mel = [3 2 1 2 3 3 3 0 2 2 2 0 3 5 5 0 3 2 1 2 3 3 3 3 2 2 3 2 1]+1; acc = [3 0 5 0 3 0 3 3 2 0 2 2 3 0 5 5 3 0 5 0 3 3 3 0 2 2 3 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Полосно-заграждающий сигнал для отделения среднего регистра от двух других. Задайте частоты полосы пропускания 230 Гц и 450 Гц. Постройте график исходных и фильтрованных сигналов во временных и частотных диапазонах.
bong = bandstop(song,[230 450],fs);
% To hear, type sound(bong,fs)
bandstop(song,[230 450],fs)![Figure contains 2 axes. Axes 1 with title Bandstop Filtering (Fpass = [230 450] Hz) contains 2 objects of type line. These objects represent Original, Filtered. Axes 2 contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandstopFilteringOfMusicalSignalExample_02.png)
Постройте спектрограмму песни без среднего регистра.
figure pspectrum(bong,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Фильтруйте белый шум, дискретизированный с частотой дискретизации 1 кГц с помощью полосно-заграждающего фильтра с бесконечной импульсной характеристикой с шириной полосы стопора 100 Гц. Используйте различные значения крутизны. Постройте график спектров фильтрованных сигналов.
fs = 1000; x = randn(20000,1); [y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',0.5); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',0.8); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',0.95); pspectrum([y1 y2 y3],fs) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north')

Вычислите и постройте график частотных характеристик фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north') ylim([-120 20])

Сделать фильтры асимметричными путем определения различных значений крутизны на более низкой и высокой частотах полосы пропускания.
[y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); pspectrum([y1 y2 y3],fs)

Вычислите и постройте график частотных характеристик фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) ylim([-120 20])

The 'Steepness' аргумент управляет шириной переходных областей фильтра. Чем меньше крутизна, тем шире переходная область. Чем выше крутизна, тем более узкая переходная область.
Чтобы интерпретировать крутизну фильтра, примите во внимание следующие определения:
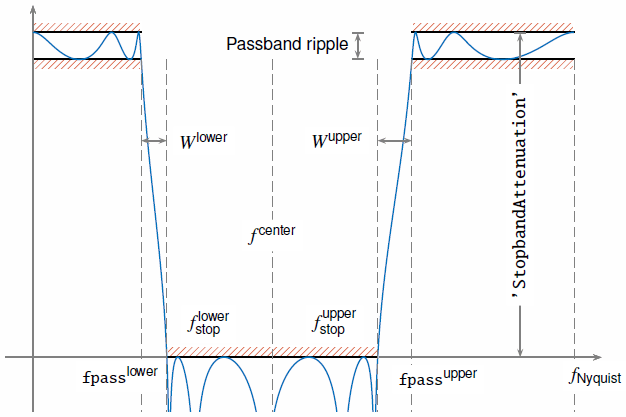
Частота Найквиста, f Найквиста, является самой высокой частотной составляющей сигнала, который может быть дискретизирован с заданной частотой без сглаживания. f Nyquist равен 1 (× π рад/сэмпл), когда входной сигнал не имеет информации о времени и fs/ 2 hertz, когда входной сигнал является расписанием или когда вы задаете частоту дискретизации.
Нижняя и верхняя частоты полосы остановки фильтра, f остановитеlower и f стопupper, являются ли частоты, между которыми ослабление равно или больше значения, заданного при помощи 'StopbandAttenuation'.
Центр области стопор fcenter = (f стопlower + f стопupper)/2.
Нижняя ширина перехода фильтра, Wlower, является f стопомlower – fpasslower.
Верхняя ширина перехода фильтра, Wupper, есть fpassupper - f упорupper.
Большинство неидеальных фильтров также ослабляют входной сигнал через полосу пропускания. Максимальное значение этого частотно-зависимого ослабления называется неравномерностью в полосе пропускания. Каждый фильтр, используемый bandstop имеет неравномерность в полосе пропускания 0,1 дБ.
Чтобы контролировать ширину переходных полос, можно задать 'Steepness' как двухэлементный вектор, [slower, supper], или скаляр. Когда вы задаете 'Steepness' как вектор, функция:
Вычисляет нижнюю ширину перехода как
Wlower = (1 – slower) × (fcenter – fpasslower).
Когда первый элемент 'Steepness' равно 0,5, ширина перехода 50% от (fcenter – fpasslower).
Как первый элемент 'Steepness' приближается к 1, ширина перехода постепенно сужается, пока не достигает минимального значения 1% (fcenter – fpasslower).
Вычисляет верхнюю ширину перехода как
Wupper = (1 – supper) × (fpassupper – fcenter).
Когда второй элемент 'Steepness' равно 0,5, ширина перехода 50% от (fpassupper – fcenter).
Как второй элемент 'Steepness' приближается к 1, ширина перехода постепенно сужается, пока не достигает минимального значения 1% (fpassupper – fcenter).
Когда вы задаете 'Steepness' в качестве скаляра функция проектирует фильтр с равными нижней и верхней ширинами перехода. Значение по умолчанию 'Steepness' составляет 0,85.
