Этот пример показов, как спроектировать ПИД-регулятор для степени электронной системы, смоделированной в Simulink® использование Simscape™ Electrical™ компонентов.
Многие системы силовой электроники не могут быть линеаризированы, потому что они используют высокочастотные коммутационные компоненты, такие как генераторы модуляции ширины импульса (PWM). Однако большинство инструментов Simulink Control Design™ PID-настройки проектируют коэффициенты ПИД на основе линеаризированной модели объекта управления. Чтобы получить такую модель для модели степени электроники, которая не может быть линеаризирована, можно:
Оцените параметры линейной модели объекта с помощью программного обеспечения System Identification Toolbox™, как показано в этом примере.
Оцените частотную характеристику объекта в области значений частот. Для получения примера смотрите Проект Controller для Степени электронной модели с использованием данных частотной характеристики.
Этот пример использует модель усилителя конвертера в качестве примера степени электронной системы. Схема преобразователя постоянного тока преобразует одно напряжение постоянного тока в другое, обычно более высокое, постоянное напряжение путем управляемого измельчения или переключения напряжения источника.
mdl = 'scdboostconverter';
open_system(mdl)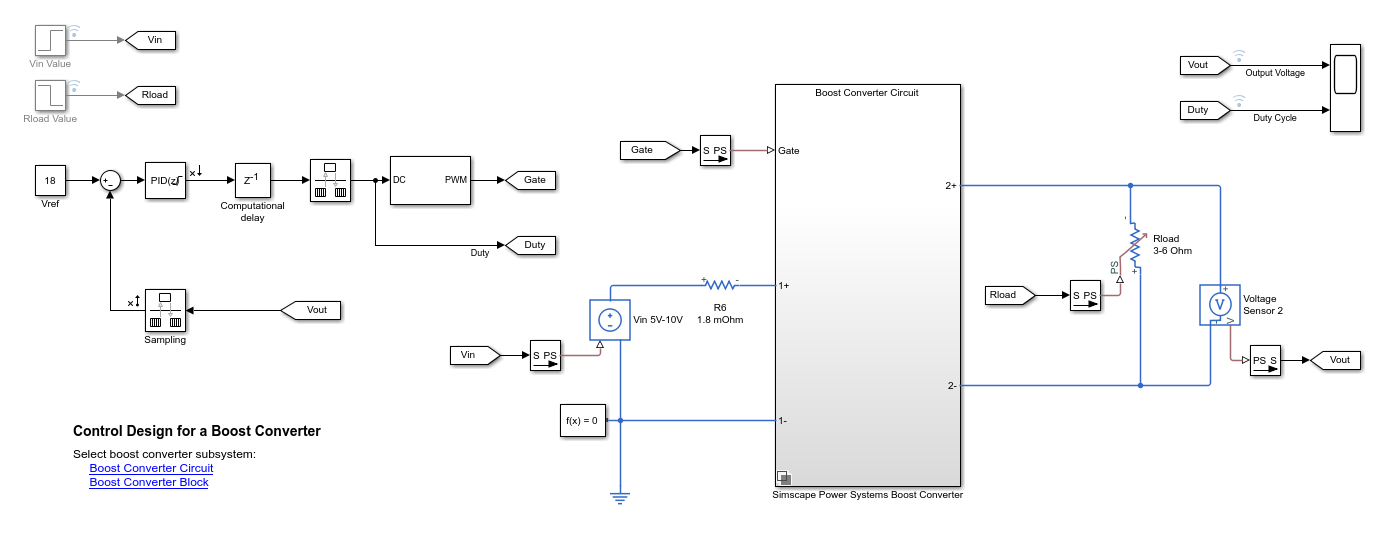
В этой модели для переключения используется МОП-транзистор, управляемый сигналом модуляции ширины импульса (PWM). Выходное Vout напряжения должно регулироваться до заданного Vref. Цифровой ПИД-регулятор регулирует коэффициент заполнения ШИМ, Duty, на основе сигнала ошибки напряжения. В данном примере вы оцениваете линейную модель от коэффициента заполнения PWM до Vout напряжения нагрузки.
Программное обеспечение Simscape Electrical содержит предопределенные блоки для многих систем силовой электроники. Эта модель содержит вариантную подсистему с двумя версиями модели преобразователя ускорения:
Схема усилителя преобразователя, сконструированная с использованием компонентов степени. Параметры компонентов схемы основаны на [1].
Блок усилителя сконфигурирован так, чтобы иметь те же параметры, что и схема усилителя. Для получения дополнительной информации об этом блоке см. Boost Converter (Simscape Electrical).
Чтобы спроектировать контроллер для усилителя, вы должны сначала определить установившуюся рабочую точку, в которой вы хотите, чтобы конвертер работал. Для получения дополнительной информации о поиске рабочих точек смотрите Найти статические рабочие точки для моделей Simscape. В данном примере используйте рабочую точку, оцененную из моментального снимка симуляции.
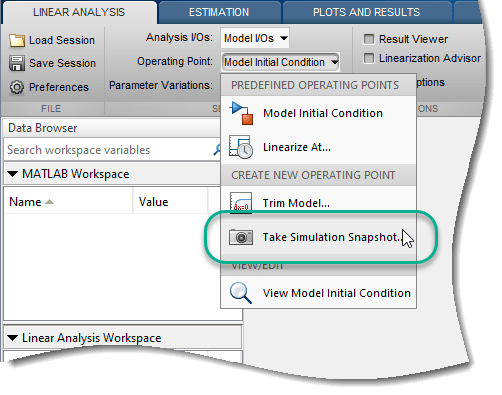
Чтобы найти рабочую точку, используйте Model Linearizer. Чтобы открыть Model Linearizer, в окне модели Simulink, в галерее Apps, нажмите Model Linearizer.
В Model Linearizer, на вкладке Linear Analysis, в раскрывающемся списке Operating Point, выберите Take Simulation Snapshot.
В диалоговом окне Ввод времени моментального снимка для линеаризации, в поле Simulation snapshot times, введите 0.045, что является достаточным временем для того, чтобы система с обратной связью достигла устойчивого состояния.
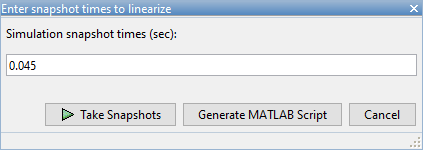
Нажмите Take Snapshots.
Программа симулирует модель и создает рабочую точку, которая содержит входные параметры и значения состояний модели в заданное время моментального снимка. Эта рабочая точка, op_snapshot1, добавляется к Linear Analysis Workspace.
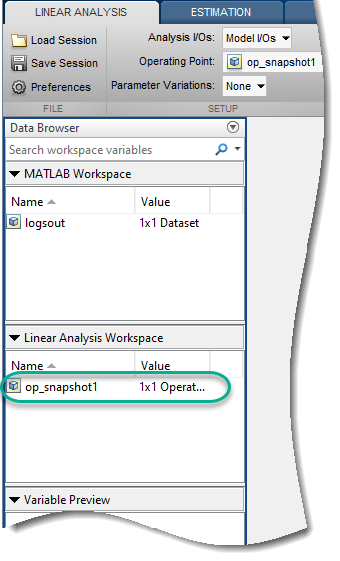
Чтобы инициализировать модель с вычисленной рабочей точкой, дважды кликните op_snapshot1.
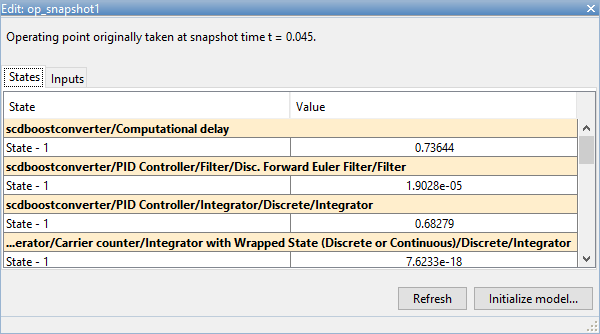
В диалоговом окне «Редактирование» нажмите кнопку Initialize model.
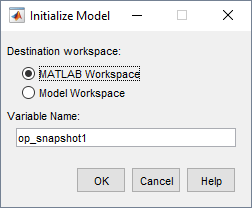
В диалоговом окне Initialize Model выберите MATLAB Workspace и нажмите OK. Программное обеспечение экспортирует рабочую точку в MATLAB® рабочая область и инициализирует модель с входами и состояниями в рабочей точке.
Перед настройкой блока ПИД-регулятора с помощью PID Tuner необходимо задать структуру контроллера. Для этого дважды кликните блок контроллера. Затем задайте следующие параметры контроллера:
Controller
Form
Time domain
Discrete-time settings
Другие настройки, такие как начальные условия контроллера, уровни насыщения на выходе и анти-насыщение строения.
В данном примере используйте токовый контроллер строения; то есть ПИД-регулятор параллельной формы в дискретном времени без анти-насыщения.
Используя PID Tuner, можно настроить параметры следующих блоков контроллеров:
Если ваша модель использует блок Simscape Electrical Discrete PI Controller (Simscape Electrical) или Discrete PI Controller with Integral Anti-Windup (Simscape Electrical), необходимо заменить этот блок на Discrete PID Controller блок перед настройкой.
Чтобы открыть PID Tuner, нажмите Tune. Когда PID Tuner впервые откроется, он пытается линеаризировать модель. Из-за компонентов PWM модель аналитически линеаризируется до нуля.
Чтобы получить линейную модель объекта управления, на вкладке PID Tuner нажмите Plant, а затем под Create a New Plant нажмите Identify New Plant.
Чтобы идентифицировать модель объекта управления, сначала получите входные/выходные данные путем симуляции модели. На вкладке Plant Identification щелкните Get I/O Data > Simulate Data. Для идентификации объекта необходимо задать конечное значение для времени остановки модели Simulink.
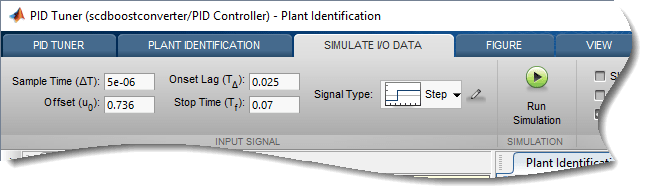
На вкладке Simulate I/O Data сконфигурируйте входной сигнал со следующими настройками.
Signal Type из Step.
Sample Time из 5e-06.
Onset Lag из 0.025, что является достаточным временем для достижения объектом устойчивого состояния.
Stop Time из 0.07, что является достаточным временем для того, чтобы выход объекта вернулся в устойчивое состояние после шага ввода.
Offset из 0.736, которое является значением выходного сигнала блока PID Controller в вычисленной рабочей точке. Для этой модели смещение соответствует значению состояния в блоке Computational delay. Если у вас нет такого соответствующего состояния в модели, можно прикрепить возможности к выходу блока ПИД-регулятор и симулировать модель в вычисленной рабочей точке.
Чтобы задать амплитуду шага, щелкните. ![]() Затем в диалоговом окне Step Input Specifications в поле Amplitude введите
Затем в диалоговом окне Step Input Specifications в поле Amplitude введите 0.01. Это значение достаточно велико, чтобы достаточно возбуждать систему и достаточно мало, чтобы предотвратить вход контроллера в режим прерывистого тока.
Нажмите Run Simulation. Для получения входной/выходной характеристики объекта управления PID Tuner вводит заданный входной сигнал на выходе блока PID Controller и измеряет соответствующую выходную характеристику на входе контроллера. Программа запускает две симуляции, отклик смещения без входного сигнала и входа ответ с входным сигналом. Различие между этими ответами является выходом ответом.
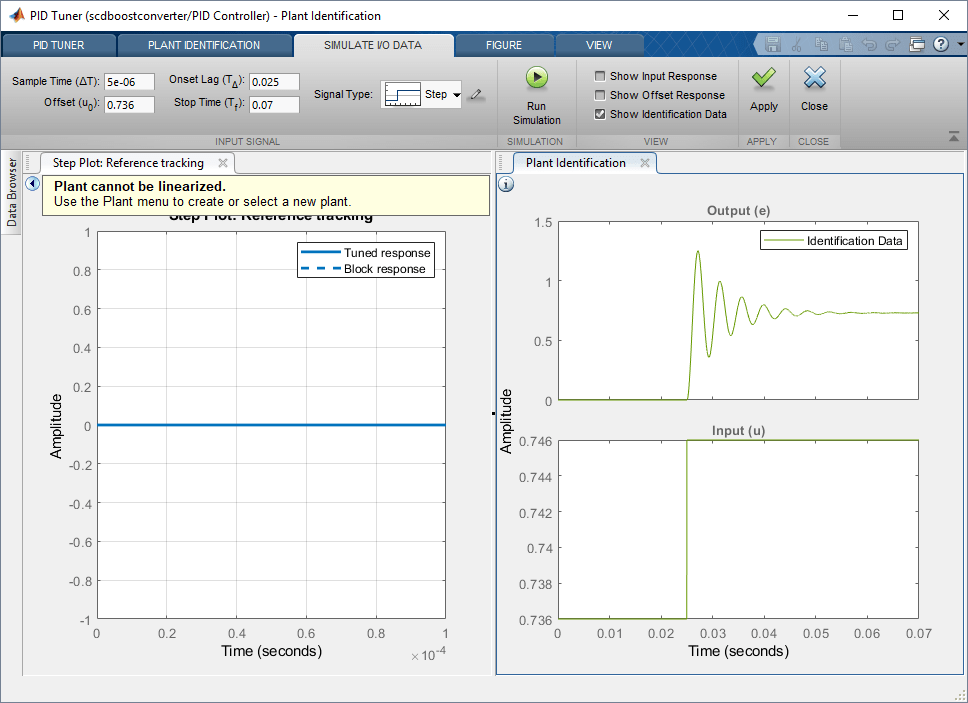
В Plant Identification документе график Input показывает заданный входной сигнал, а график Output - соответствующую выходную характеристику.
Чтобы использовать эти моделируемые входные/выходные данные, нажмите Apply. Затем, чтобы закрыть вкладку Simulate I/O Data, нажмите Close.
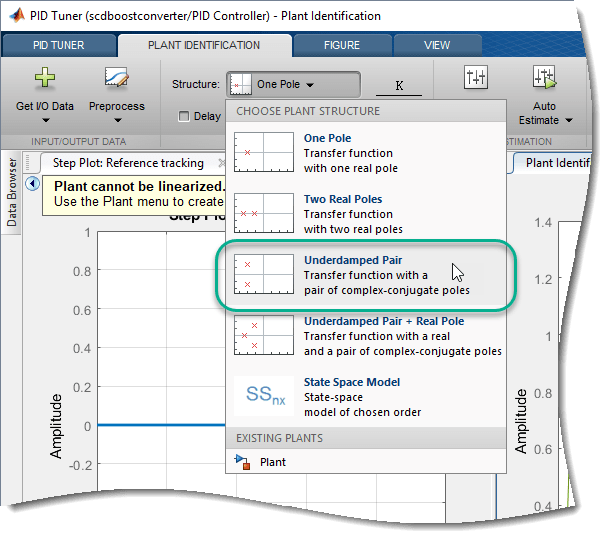
На закладке Plant Identification выберите структуру завода, которая будет определяться на основе знаний о заводе и внешнего вида выходного шага. В этом примере выходная характеристика выглядит как недостаточно затухающая характеристика второго порядка. В раскрывающемся списке Structure выберите Underdamped Pair.
Чтобы получить черновое приближение идентифицированного объекта, на Identified Plant Structure графике перетащите штриховые линии, которые соответствуют огибающей переходной характеристике. Настройте ответ так, чтобы он аппроксимировал выход ответ.
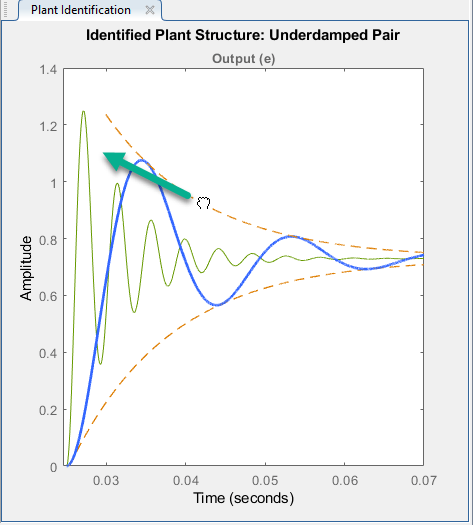
Чтобы подстроить приблизительный ответ, нажмите Auto Estimate. Программа оценивает параметры идентифицированной модели объекта управления, используя текущие параметры в качестве начального предположения.
Диалоговое окно Объекта Identification Прогресса показывает результаты процесса оценки. В данном примере подгонка к данным оценки больше 98%. Для использования указанного объекта на вкладке Plant Identification щелкните Apply.
PID Tuner обновляет свою идентифицированную модель объекта управления, выбирает параметры контроллера, чтобы соответствовать требованиям настройки в разделе Tuning Tools, и строит график настроенной характеристики этого контроллера. Чтобы развернуть график, закройте Plant Identification документ.
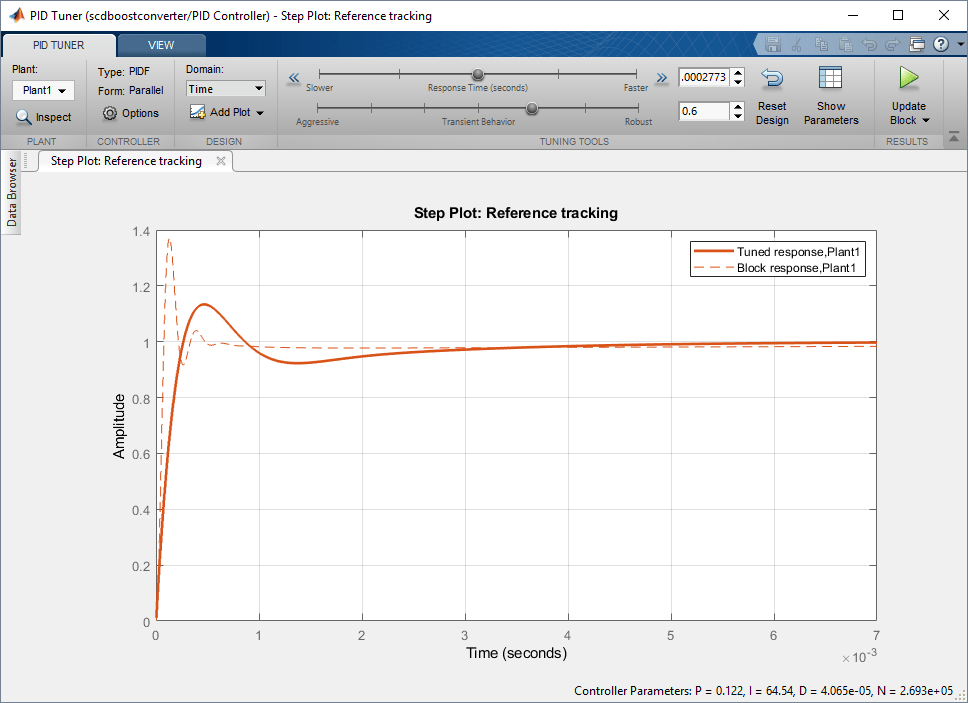
На переходную характеристику показан блок ответ (штриховая линия) и настроенный ответ (сплошная линия). Реакция блока соответствует текущим коэффициентам ПИД в блоке PID Controller. Настроенная характеристика соответствует настроенным коэффициентам ПИД в PID Tuner.
Чтобы настроить контроллер на основе полосы пропускания и запаса по фазе, на вкладке PID Tuner, в выпадающем списке Domain, выберите Frequency.
В данном примере установите Bandwidth и Phase Margin равными 9425 рад/с (1,5 кГц) и 60 град, соответственно, в соответствии с критериями проектирования, указанными в [1].
PID Tuner выбирает параметры контроллера, которые соответствуют этим проектом спецификациям.
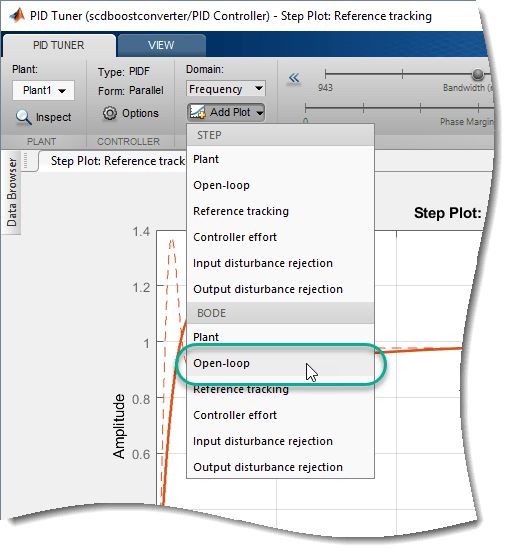
Чтобы просмотреть частотную характеристику настроенной системы, щелкните Add Plot, а под Bode нажмите Open-loop.
Чтобы настроить пределы диаграммы Боде, щелкните правой кнопкой мыши область графика и выберите Properties. Затем в диалоговом окне «Property Editor» на вкладке «Limits» установите пределы по осям.
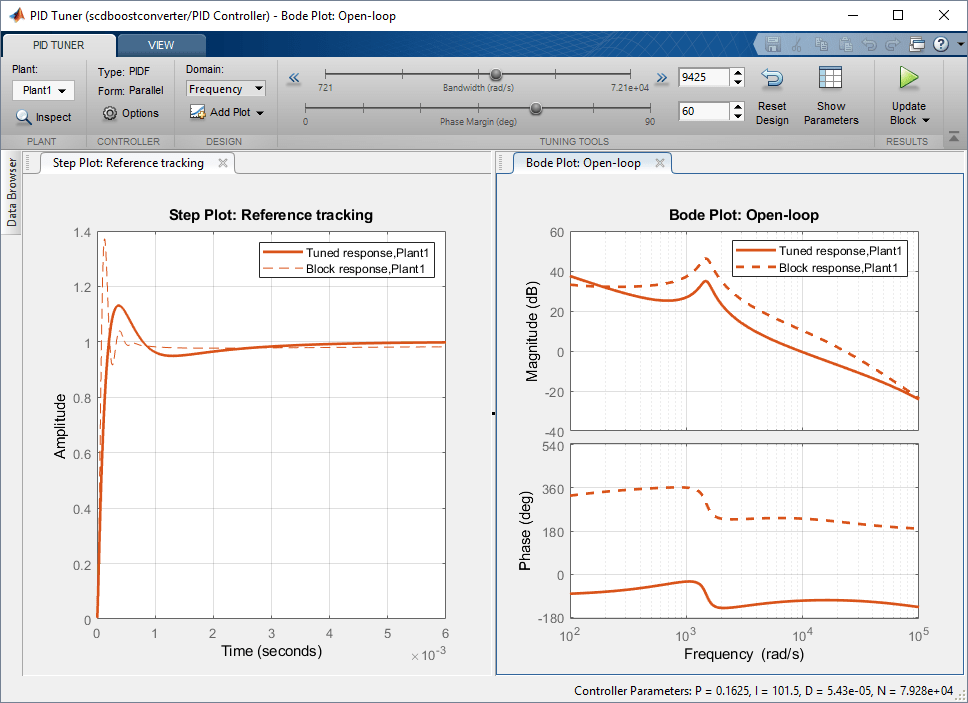
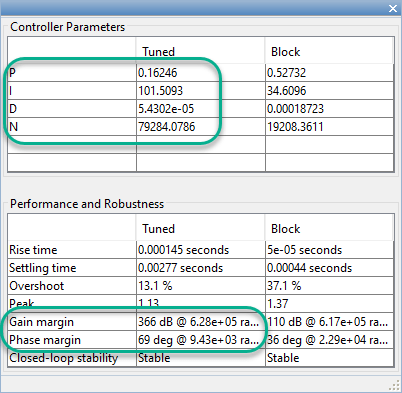
Чтобы просмотреть настроенные параметры контроллера и метрики эффективности, включая коэффициент усиления и запасов по фазе, нажмите Show Parameters. Настроенный результат имеет запас усиления 366 дБ и запас по фазе 69 ° С около 9425 рад/с.
Чтобы обновить блок PID Controller с помощью настроенных коэффициентов усиления, на вкладке PID Tuner, нажмите Update Block.
Можно изучить эффективность настроенного контроллера, используя симуляцию с нарушениями порядка линии и нагрузки. Чтобы изучить динамическую эффективность контроллера, модель Simulink использует следующие нарушения порядка:
Нарушение порядка линии при t = 0,075 с, что увеличивает входное напряжение, Vin, с 5V до 10V
Нарушение порядка нагрузки при t = 0,1 с, что увеличивает сопротивление нагрузки, Rload, с 3 Ом до 6 Ом
Симулируйте модель.
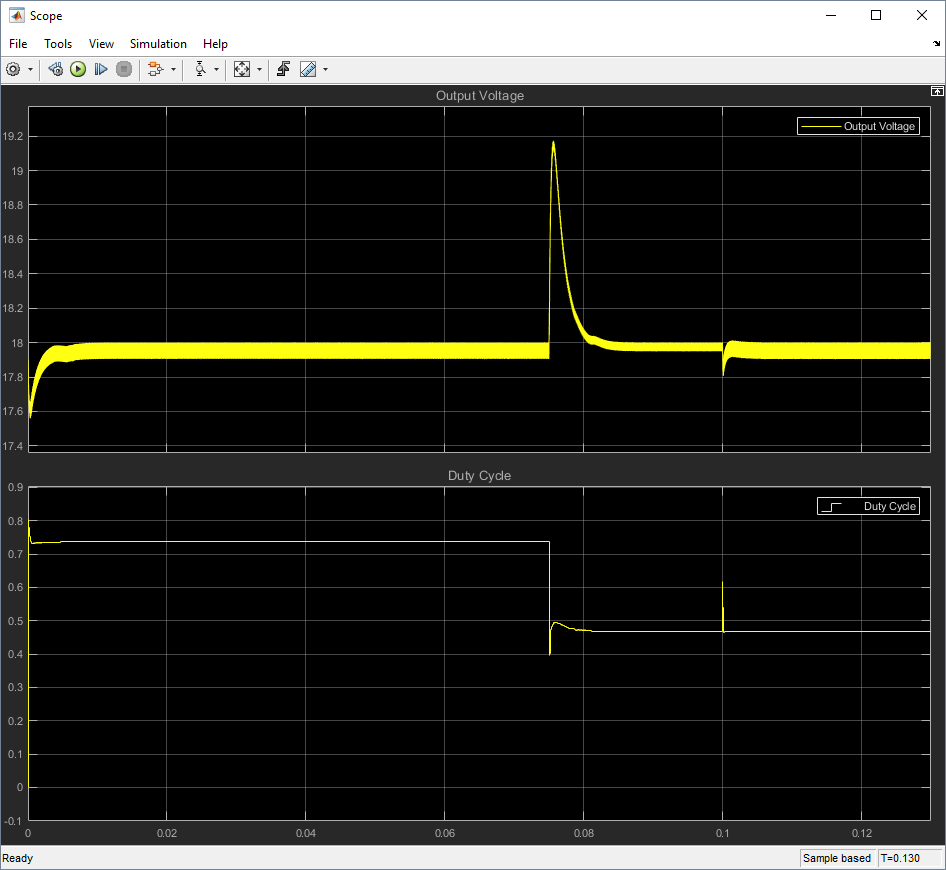
Контроллер хорошо отклоняет линию и нарушения порядка нагрузки.
[1] Lee, S.W. «Practical Feedback Loop Analysis for Voltage-Mode Boost Converter». Номер отчета по приложению SLVA057. Техасские инструменты. Январь 2014 года. www.ti.com/lit/an/slva633/slva633.pdf
