Этот пример готовых узлов представляет полную модель динамики аппарата, проходящую маневр двухполосного изменения согласно стандарту ISO 3888-2[4]. Можно создать свои собственные версии, установив среду для тестирования того, что ваше транспортное средство соответствует проектным требованиям при нормальных и экстремальных условиях вождения. Используйте пример готовых узлов для анализа транспортного средства езды и обработки и разработки элементов управления шасси. Чтобы выполнить исследования транспортного средства, включая стабильность рыскания и пределы бокового ускорения, используйте этот пример готовых узлов.
ISO 3888-2 задает маневр двухполосного изменения для проверки производительности транспортного средства по предотвращению препятствий. В тесте драйвер:
Ускоряется, пока транспортное средство не достигнет целевой скорости
Отпускает педаль акселератора
Поворачивает руль, чтобы следовать по пути в левую полосу
Поворачивает руль, чтобы следовать по пути назад в правую полосу
Как правило, конусы помечают контуры маршрута. Если транспортное средство и драйвер могут договориться о маневре, не задев конус, транспортное средство проходит тест.
Чтобы протестировать расширенные системы помощи драйверу (ADAS) и программное обеспечение для автоматического вождения (AD), планирования и управления, можно запустить маневр в 3D окружении. Требования к платформе двигателя визуализации 3D и рекомендации по оборудованию смотрите в 3D Требования и ограничения Engine визуализации.
Чтобы создать и открыть рабочую копию проекта примера готовых узлов двухполосного изменения, введите
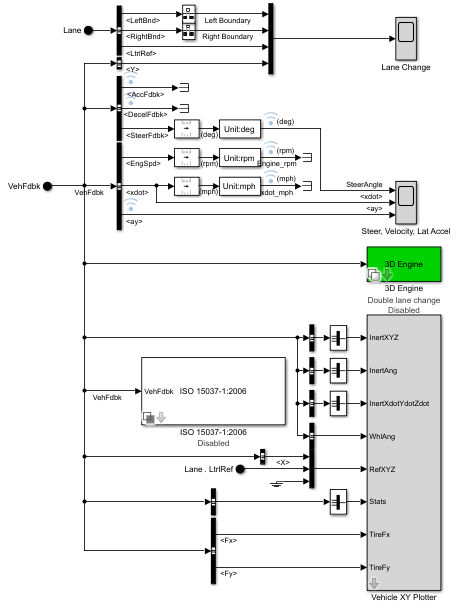
В этой таблице представлены блоки и подсистемы в пример готовых узлов. Некоторые подсистемы содержат варианты.
| Пример готовых узлов | Описание | Варианты |
|---|---|---|
Lane Change Reference Generator | Генерирует сигналы маршрута для подсистемы визуализации и сигналы траектории | |
Команды драйвера | Реализует модель драйвера, которую пример готовых узлов использует для генерации команд ускорения, торможения, передачи и рулевого управления. По умолчанию Driver Commands подсистема варианта является блоком Predictive Driver. | ✓ |
Окружение | Реализует силы ветра и сухопутных войск | ✓ |
Контроллеры | Реализует контроллеры для модулей управления двигателем (ECU), коробок передач, систем антиблокировочного торможения (ABS) и активных дифференциалов. | ✓ |
Пассажирское транспортное средство | Реализует:
| ✓ |
Визуализация | Предоставляет траекторию транспортного средства, ответ драйвера и 3D визуализацию | ✓ |
Чтобы переопределить вариант по умолчанию, на вкладке Modeling, в разделе Design, щелкните раскрывающийся список. В General разделе выберите Variant Manager. В Диспетчере вариантов перейдите к варианту, который необходимо использовать. Щелкните правой кнопкой мыши и выберите Override using this Choice.
Используйте блок Lane Change Reference Generator для генерации:
Сигналы маршрута для Подсистемы визуализации - контуры левого и правого маршрута являются функцией от параметра Vehicle width.
Скорости и боковые опорные сигналы для блока Predictive Driver - Используйте Lateral reference position breakpoints и Lateral reference data параметры, чтобы задать боковую опорную траекторию как функцию от продольного расстояния.
Чтобы задать целевую скорость, используйте параметр Longitudinal entrance velocity setpoint.
Блок Driver Commands реализует модель драйвера, которую пример готовых узлов использует для генерации команд ускорения, торможения, передачи и рулевого управления. По умолчанию, если вы выбираете Reference Generator параметров блоков Use maneuver-specific driver, initial position, and scene, пример готовых узлов выбирает водителя для заданного вами маневра.
Установка командного режима транспортного средства | Реализация |
|---|---|
| Longitudinal Driver блок - Продольный контроллер отслеживания скорости. На основе ссылки и скоростей обратной связи блок генерирует нормированные команды ускорения и торможения, которые могут варьироваться от 0 до 1. Используйте блок, чтобы смоделировать динамическую характеристику драйвера или сгенерировать команды, необходимые для отслеживания продольного цикла привода. |
| Predictive Driver блок - Контроллер, который генерирует нормированные команды управления, ускорения и торможения для отслеживания продольной скорости и бокового опорного перемещения. Нормированные команды могут варьироваться от -1 до 1. Контроллер использует однопутную (велосипедную) модель для оптимального одноточечного предварительного просмотра. |
| Реализует систему разомкнутого контура, так что можно сконфигурировать пример готовых узлов для постоянного или основанного на сигналах рулевого управления, ускорения, торможения и командного входа передачи. |
Подсистема Окружения генерирует силы ветра и земли. У пример готовых узлов есть эти окружения варианты.
| Окружение | Вариант | Описание |
|---|---|---|
Наземная обратная связь |
| Использует Vehicle Terrain Sensor блок для реализации трассировки лучей в 3D окружении |
| Реализует постоянное значение трения |
Подсистема Контроллеров генерирует команды крутящего момента двигателя, передачи, тормозного давления и перепада давления.
Контроллер ECU генерирует команду крутящего момента двигателя. Контроллер предотвращает избыточное обновление двигателя, ограничивая команду крутящего момента двигателя значением, заданным переменного рабочего пространства модели EngRevLim. По умолчанию значение равно 7000 об/мин. Если команда дифференциального крутящего момента превышает ограниченную команду крутящего момента двигателя, то ЭБУ устанавливает команду крутящего момента двигателя на заданный дифференциальный крутящий момент.
Подсистема контроллера трансмиссии генерирует команду трансмиссии. Контроллер включает эти варианты.
| Вариант | Описание |
|---|---|
| Реализует модуль управления передачей (TCM), который использует Stateflow® логика для генерации команды передачи на основе ускорения транспортного средства, скорости вращения колеса и скорости вращения двигателя. |
| Разомкнутый контур. Контроллер устанавливает команду передачи на запрос передачи. |
| Реализует модуль управления трансмиссией (TCM), который использует логику Stateflow, чтобы сгенерировать команду передачи на основе ускорения транспортного средства, команды торможения, скорости колеса, скорости вращения двигателя и запроса передачи. |
| Реализует контроллер лопасти, который использует ускорение транспортного средства и скорость вращения двигателя, чтобы сгенерировать команду передачи. |
Подсистема Контроллера Тормоза реализует Подсистему Управления Давлением Тормоза, чтобы сгенерировать команду Давления Тормоза. Подсистема управления тормозным давлением имеет эти варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер обратной связи антиблокировочной системы (ABS), который переключается между двумя состояниями, чтобы регулировать скольжение колеса. Релейное управление минимизирует ошибку между фактическим проскальзыванием и желаемым проскальзыванием. Для желаемого скольжения контроллер использует значение скольжения, при котором кривая mu-скольжения достигает пикового значения. Это желаемое значение скольжения оптимально для минимального пути торможения. |
| Управление тормозом разомкнутого контура. Контроллер устанавливает команду тормозного давления на ссылку тормозное давление на основе команды тормоза. |
| Пятигосударственное управление ABS при симуляции маневра.1,2,3 Пятигосударственный контроллер использует логическое переключение, основанное на замедлении колеса и ускорении транспортного средства, чтобы контролировать давление торможения на каждом колесе. Рассмотрите использование управления ABS в пяти состояниях, чтобы предотвратить блокировку колеса, уменьшить путь торможения или сохранить стабильность рыскания во время маневра. Параметры ABS по умолчанию устанавливаются так, чтобы работать на дорогах, которые имеют постоянный коэффициент масштабирования коэффициента трения 0,6. |
Подсистема активного дифференциального управления генерирует команду дифференциального давления. Чтобы вычислить команду, подсистема имеет эти варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер, который генерирует команду перепада давления на основе:
|
| Не реализует контроллер. Устанавливает команду перепада давления равной 0. |
Подсистема Passenger Vehicle имеет двигатель, контроллеры и корпус транспортного средства с четырьмя колесами. В частности, транспортное средство содержит эти подсистемы.
| Корпус, Подвеска, Подсистема колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Транспортное средство с четырьмя колесами:
|
PassVeh14DOF |
| Транспортное средство с четырьмя колесами.
|
| Подсистемы двигателей | Вариант | Описание |
|---|---|---|
Сопоставленный Engine |
| Отображенный двигатель с искровым зажиганием |
Подсистема рулевого управления, трансмиссии, привода и тормозов | Вариант | Описание | |
|---|---|---|---|
Идеальная неподвижная передача привода | Модель привода | All Wheel Drive | Сконфигурируйте привод для полного, переднего, заднего или заднего активного дифференциального привода и укажите тип муфты крутящего момента. |
| |||
| |||
| |||
Передача |
| Реализует идеальную коробку передач с фиксированной передачей. | |
Тормозная Гидравлика | НА | Реализует эвристическую реакцию гидравлической системы, когда контроллер применяет команду тормоза к цилиндру. Включает коэффициенты смещения переднего и заднего колес. Подсистема преобразует приложенное давление в положение золотника гидроцилиндра. Для создания тормозного давления золотник применяет поток вниз по потоку к цилиндрам. | |
Когда вы запускаете симуляцию, Подсистема визуализации предоставляет информацию о драйвере, транспортном средстве и отклике. Во время маневра примера готовых узлов журналов транспортного средства сигналы, включая рулевое управление, транспортное средство и скорость вращения двигателя, и боковое ускорение. Можно использовать Данные моделирования Inspector, чтобы импортировать записанные сигналы и изучить данные.
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Реакция транспортного средства | Реакция транспортного средства:
|
Изменение маршрута Scope блок | Объем бокового транспортного средства в зависимости от времени:
|
Руль, Скорость, Lat Accel Scope блок |
|
Плоттер XY транспортного средства | Зависимости продольного и поперечного расстояния транспортного средства |
ISO 15037-1:2006 блок | Отображение стандартных сигналов измерения ISO в Данные моделирования Inspector, включая угол и крутящий момент рулевого колеса, продольный и поперечная скорость, и боковой угол |
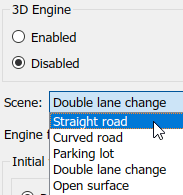
Вы можете включить или отключить 3D окружение визуализации. Требования к платформе двигателя визуализации 3D и рекомендации по оборудованию смотрите в 3D Требования и ограничения Engine визуализации. После того, как вы откроете пример готовых узлов, в Подсистеме визуализации, откройте блок 3D Engine. Установите эти параметры.
3D Engine с Enabled.
Scene к одной из сцен, например Straight road.
Для размещения транспортного средства в месте происшествия:
Выберите метод инициализации положения:
Recommended for scene - Установите начальное положение транспортного средства на значения, рекомендуемые для сцены
User-specified - Установите свое собственное начальное положение транспортного средства
Щелкните Update the model workspaces with the initial values, чтобы перезаписать исходное положение транспортного средства в рабочих пространствах модели на примененные значения.
Когда вы запускаете симуляцию, просмотрите ответ транспортного средства в AutoVrtlEnv окно.
Примечание
Чтобы открыть и закрыть AutoVrtlEnv , используйте Simulink® Кнопки Run и Stop. Если вы вручную закрываете AutoVrtlEnv Window, Simulink останавливает симуляцию с ошибкой.
Когда вы активируете 3D окружение визуализации, вы не можете отодвинуть симуляцию назад.
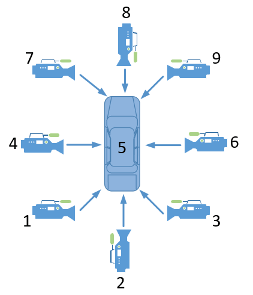
Для плавного изменения полей зрения камеры используйте эти ключевые команды.
| Ключ | Поле зрения камеры | |
|---|---|---|
1 | Назад налево |
|
2 | Назад | |
3 | Назад справа | |
4 | Левый | |
5 | Внутренний | |
6 | Правильно | |
7 | Спереди налево | |
8 | Фронт | |
9 | Передний правый | |
0 | Наверху | |
Для дополнительных элементов управления камерой используйте эти ключевые команды.
| Ключ | Управление камерой |
|---|---|
| Вкладка | Циклический просмотр между всеми транспортными средствами в сцене. |
Колесо прокрутки мыши | Управляйте расстоянием между камерами и транспортным средством. |
L | Включение или отключение эффекта задержки камеры. Когда вы включаете эффект задержки, поле зрения камеры включает в себя:
Это отставание позволяет улучшить визуализацию общего ускорения и вращения транспортного средства. |
| F | Включите или отключите режим свободной камеры. Когда вы включите режим свободной камеры, можно использовать мышь, чтобы изменить тангаж и рыскание камеры. Этот режим позволяет вам вращать камеру вокруг транспортного средства. |
[1] Пасильяс-Лепин, Уильям. Гибридное моделирование и анализ предельного цикла для класса пятифазных алгоритмов антиблокировки. Динамика систем транспортных средств 44, № 2 (2006): 173-188.
[2] Жерар, Матье, Уильям Пасильяс-Лепин, Эдвин Де Фрис и Мишель Верхеген. «Усовершенствования пятифазного алгоритма ABS для экспериментальной валидации». Динамика систем транспортных средств 50, № 10 (2012): 1585-1611.
[3] Bosch, R. «Bosch Automotive Handbook». 10 эд. Warrendale, PA: SAE International, 2018.
[4] ISO 3888-2: 2011. Легковые автомобили - Тестовый трек для тяжелого маневра с изменением маршрута.
3D Engine | Mapped SI Engine | Predictive Driver | Vehicle Terrain Sensor