Извлечение гистограммы ориентированных градиентов функции
features = extractHOGFeatures(I)I. Функции возвращаются в векторе 1 байт- N, где N - длина функции HOG. Возвращённые функции кодируют информацию о локальной форме из областей внутри изображения. Можно использовать эту информацию для многих задач, включая классификацию, обнаружение и отслеживание.
[ возвращает функции, извлеченные вокруг заданных местоположений точек. Функция также возвращается features,validPoints]
= extractHOGFeatures(I,points)validPoints, который содержит местоположения входных точек, окружающая область которых полностью содержится в I. Информация о шкале, связанная с точками, игнорируется.
[___, необязательно возвращает HOG функции визуализацию, используя любой из предыдущих синтаксисов. Отобразить эту визуализацию можно используя visualization]
= extractHOGFeatures(I,___)plot(visualization).
[___] = extractHOGFeatures(___, использует дополнительные опции, заданные одним или несколькими аргументами в виде пар Имя, Значение, используя любой из предыдущих синтаксисов.Name,Value)
Прочитайте интересующее вас изображение.
img = imread('cameraman.tif');Извлечение функций HOG.
[featureVector,hogVisualization] = extractHOGFeatures(img);
Постройте график функций HOG по оригинальному изображению.
figure;
imshow(img);
hold on;
plot(hogVisualization);
Прочитайте интересующее вас изображение.
I1 = imread('gantrycrane.png');Извлечение функций HOG.
[hog1,visualization] = extractHOGFeatures(I1,'CellSize',[32 32]);Отобразите оригинальное изображение и функции HOG.
subplot(1,2,1); imshow(I1); subplot(1,2,2); plot(visualization);

Читайте в интересующем вас изображении.
I2 = imread('gantrycrane.png');Обнаружите и выберите самые сильные углы на изображении.
corners = detectFASTFeatures(im2gray(I2)); strongest = selectStrongest(corners,3);
Извлечение функций HOG.
[hog2,validPoints,ptVis] = extractHOGFeatures(I2,strongest);
Отобразите оригинальное изображение с наложением HOG функций вокруг самых сильных углов.
figure; imshow(I2); hold on; plot(ptVis,'Color','green');

features - Извлечённые функции HOGИзвлеченные признаки HOG, возвращенные как вектор 1-бай- N или P матрица -by- Q. Эти функции кодируют информацию о локальной форме из областей или из точек в изображении. Можно использовать эту информацию для многих задач, включая классификацию, обнаружение и отслеживание.
features выход | Описание |
|---|---|
| 1-by- N вектор | Длина признака HOG, N, основана на размере изображения и значениях параметров функции. N = prod([BlocksPerImage, BlockSize, NumBins])BlocksPerImage = floor((size(I). / CellSize – BlockSize). / (BlockSize – BlockOverlap) + 1) |
| P -by - Q матрица | P - это количество допустимых точек, окружающая область которых полностью содержится в входе изображении. Вы предоставляете points входное значение для извлечения местоположений точек.Окружающая область вычисляется как: CellSize.* BlockSize. Длина вектора функции, Q, вычисляется как: prod([NumBins, BlockSize]). |
Рисунок ниже показывает изображение с шестью камерами.
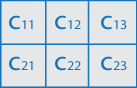
Если вы задаете BlockSize по [2 2], это сделает размер каждого блока HOG, 2 на 2 камеры. Размер камер указан в пикселях. Можно задать его с помощью CellSize свойство.

Вектор функции HOG организован блоками HOG. Гистограмма камеры, H (Cyx), является 1-бай- NumBins.
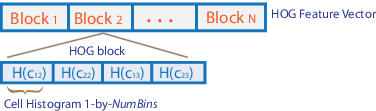
Рисунок ниже показывает вектор функции HOG с перекрытием камеры 1 на 1 между блоками.

validPoints - Действительные точкиcornerPoints | объекта BRISKPoints | объекта SURFPoints | объекта MSERRegions | объекта ORBPoints | объекта M -by-2 матрица координат [x, y]Допустимые точки, сопоставленные с каждым features вывод вектора дескриптора. Этот выход может быть возвращен как cornerPoints объект, BRISKPoints, SURFPoints объект, MSERRegions объект, ORBPoints объект или M -by-2 матрица с координатами [x, y]. Функция извлекает M количество дескрипторов из допустимых процентных точек в области размера, равной [CellSize.* BlockSize]. Извлеченные дескрипторы возвращаются как тот же тип объекта или матрицы, что и вход. Область должна быть полностью размещена в изображении.
visualization - визуализация функции HOGФункция HOG, возвращенная как объект. Функция выводит этот необязательный аргумент, чтобы визуализировать извлеченные функции HOG. Можно использовать plot метод с visualization выход. См. пример извлечения и построения графика функций HOG.
Функции HOG визуализируются с помощью сетки с равномерными интервалами rose графики. Размер камеры и размер изображения определяют размерности сетки. Каждый график розы показывает распределение градиентных ориентаций в камере HOG. Длина каждого лепестка графика розы масштабируется, чтобы указать вклад, который каждая ориентация вносит в гистограмму камеры. На графике отображаются направления ребер, перпендикулярные направлениям градиента. Просмотр графика с направлениями ребра позволяет лучше изучить форму и контуры, закодированные HOG. Каждый график розы отображается два раза NumBins лепестки.
Для построения графика функций HOG можно использовать следующий синтаксис:
plot(visualization) строит графики функций HOG как массив розовых графиков. |
plot(visualization,AX) строит графики функций HOG в осях AX. |
график (___, 'Color', Задает цвет, используемый для построения графика функций HOG, где Colorspec представляет цвет. |
[1] Dalal, N. and B. Triggs. «Гистограммы ориентированных градиентов для обнаружения человека», IEEE Computer Society Conference on Компьютерное Зрение and Pattern Recognition, Vol. 1 (June 2005), pp. 886-893.
binaryFeatures | detectFASTFeatures | detectHarrisFeatures | detectMinEigenFeatures | detectMSERFeatures | detectORBFeatures | detectSURFFeatures | extractFeatures | extractLBPFeatures | matchFeatures | MSERRegions | ORBPoints | rose | SURFPoints
