Обнаружение функций MSER и возврат MSERRegions объект
regions = detectMSERFeatures(I)MSERRegions объект, regions, содержащую информацию об функциях MSER, обнаруженных в 2-D полутоновом входном изображении, I. Этот объект использует алгоритм Максимально Стабильных Экстремальных Областей (MSER), чтобы найти области.
[___] = detectMSERFeatures( устанавливает дополнительные опции, заданные одним или несколькими I,Name,Value)Name,Value аргументы в виде пар.
Чтение изображения и обнаружение областей MSER.
I = imread('cameraman.tif');
regions = detectMSERFeatures(I);Визуализируйте области MSER, которые описаны пиксельными списками, хранящимися внутри возвращенного объекта 'regions'.
figure; imshow(I); hold on; plot(regions,'showPixelList',true,'showEllipses',false);

Отобразить эллипсы и центроиды вписываются в области. По умолчанию на графике отображаются эллипсы и центроиды.
figure; imshow(I);
hold on;
plot(regions);
Обнаружение областей MSER.
I = imread('coins.png');
[regions,mserCC] = detectMSERFeatures(I);Показать все обнаруженные области MSER.
figure imshow(I) hold on plot(regions,'showPixelList',true,'showEllipses',false)

Измерьте эксцентричность области MSER для округлости области измерения.
stats = regionprops('table',mserCC,'Eccentricity');
Пороговые значения эксцентриситета для сохранения только округлых областей. (Округлые области имеют низкий эксцентриситет.)
eccentricityIdx = stats.Eccentricity < 0.55; circularRegions = regions(eccentricityIdx);
Отобразите округлые области.
figure imshow(I) hold on plot(circularRegions,'showPixelList',true,'showEllipses',false)

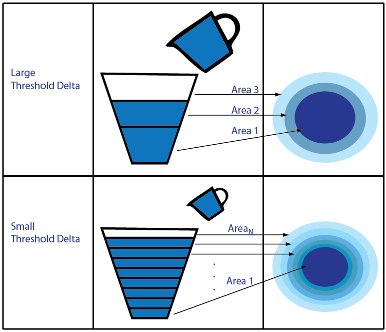
Детектор MSER постепенно проходит через область значений интенсивности входного изображения, чтобы обнаружить стабильные области. The ThresholdDelta параметр определяет количество шагов, которые детектор проверяет на стабильность. Можно представить пороговое значение дельты как размер чашки для заполнения ведра водой. Чем меньше чашка, тем больше шагов требуется для заполнения ведра. Блок может рассматриваться как профиль интенсивности области.
Объект MSER проверяет изменение размера области между различными порогами интенсивности. Изменение должна быть меньше, чем значение MaxAreaVariation параметр, который будет считаться стабильным.
Примечание
Обнаружение функций MSER не подходит для использования в изображениях с экстремальными изменениями значений интенсивности.
На высоком уровне MSER может быть объяснен путем мышления профиля интенсивности изображения, представляющего серию блоков. Представьте верхние части ведер, заподлицо с землей, и шланг, включенный на одном из ведер. Когда вода заполняется в блок, она переполняется, и следующий блок начинает заполняться. Небольшие области воды присоединяются и становятся большими водоемами, и, наконец, вся область заполняется. Когда вода заполняется в блок, она проверяется на соответствие критерию устойчивости MSER. Области появляются, растут и объединяются при различных порогах интенсивности.
[1] Nister, D., and H. Stewenius, «Linear Time Maximally Stable Extremal Regions», Lecture Notes in Computer Science. 10-я Европейская конференция по компьютерному зрению, Марсель, Франция: 2008, № 5303, стр. 183-196.
[2] Matas, J., O. Chum, M. Urba, and T. Pajdla. «Устойчивый широкий базовый стерео из максимально стабильных экстремальных областей». Материалы British Machine Vision Conference, страницы 384-396, 2002.
[3] Обдрзалек Д., С. Басовник, Л. Мач, А. Микулик. «Обнаружение элементов сцены с использованием максимально стабильных цветовых областей», Communications in Computer and Information Science, La Ferte-Bernard, France; 2009, том 82 СНГ (2010 12 01), стр. 107-115.
[4] Mikolajczyk, K., T. Tuytelaars, C. Schmid, A. Zisserman, T. Kadir, and L. Van Gool, «A Comparison of Affine Region Detectors»; International Journal of Компьютерного зрения, Volume 65, Numbers 1-2/November, 2005, pp 43-72.
detectBRISKFeatures | detectFASTFeatures | detectFASTFeatures | detectHarrisFeatures | detectKAZEFeatures | detectMinEigenFeatures | detectSURFFeatures | extractFeatures | extractHOGFeatures | matchFeatures