Обнаружение объектов с помощью алгоритма Виолы-Джонса
Каскадный детектор объектов использует алгоритм Виолы-Джонса, чтобы обнаружить лица, носы, глаза, рот или верхнюю часть тела людей. Можно также использовать Image Labeler для обучения пользовательского классификатора для использования с этим системным объектом. Для получения дополнительной информации о том, как функция работает, смотрите Запуск с Cascade Детектора объектов.
Чтобы обнаружить функции лица или верхней части тела на изображении:
Создайте vision.CascadeObjectDetector Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
detector = vision.CascadeObjectDetector
detector = vision.CascadeObjectDetector( создает детектор, сконфигурированный для обнаружения объектов, заданных входным вектором символов, model)model.
detector = vision.CascadeObjectDetector( создает детектор и конфигурирует его, чтобы использовать пользовательскую модель классификации, заданную в XMLFILE)XMLFILE вход.
detector = vision.CascadeObjectDetector(Name,Value)detector = vision.CascadeObjectDetector('ClassificationModel','UpperBody')
Чтобы использовать функцию объекта, задайте Системную object™ в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Создайте объект детектора лица.
faceDetector = vision.CascadeObjectDetector;
Прочтите вход изображение.
I = imread('visionteam.jpg');Обнаружение лиц.
bboxes = faceDetector(I);
Аннотирование обнаруженных граней.
IFaces = insertObjectAnnotation(I,'rectangle',bboxes,'Face'); figure imshow(IFaces) title('Detected faces');

Создайте объект детектора тела и установите свойства.
bodyDetector = vision.CascadeObjectDetector('UpperBody');
bodyDetector.MinSize = [60 60];
bodyDetector.MergeThreshold = 10;Считайте входное изображение и обнаружите верхнюю часть тела.
I2 = imread('visionteam.jpg');
bboxBody = bodyDetector(I2);Аннотировать обнаруженные верхние тела.
IBody = insertObjectAnnotation(I2,'rectangle',bboxBody,'Upper Body'); figure imshow(IBody) title('Detected upper bodies');

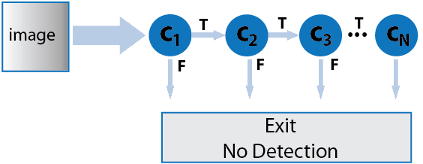
Этот объект использует каскад классификаторов, чтобы эффективно обрабатывать области изображений для присутствия целевого объекта. Каждый этап в каскаде применяет все более сложные двоичные классификаторы, что позволяет алгоритму быстро отклонять области, которые не содержат цель. Если требуемый объект не найден ни на одной стадии каскада, детектор немедленно отклоняет область и обработка прекращается. Завершая, объект избегает вызова интенсивных вычислений классификаторов далее по каскаду.
Детектор постепенно масштабирует входное изображение, чтобы найти целевые объекты. При каждом шаге шкалы скользящее окно, размер которого совпадает с размером обучающего изображения, сканирует масштабированное изображение, чтобы найти объекты. The ScaleFactor свойство определяет величину масштабирования между последовательными шагами.
Размер области поиска связан с ScaleFactor следующим образом:
search region = round((<reservedrangesplaceholder1>) * (ScaleFactorN))

Окно поиска пересекает изображение для каждого масштабированного шага.
Для каждого шага в шкале окно поиска проходит по изображению, создавая несколько обнаружений вокруг целевого объекта. Множественные обнаружения объединяются в один ограничивающий прямоугольник для каждого целевого объекта. Можно использовать MergeThreshold свойство для управления количеством обнаружений, требуемых перед объединением или отклонением обнаружений. Размер последнего ограничивающего прямоугольника является средним размером ограничивающих прямоугольников для отдельных обнаружений и лежит между MinSize и MaxSize.

[1] Лиенхарт Р., Куранов А., и В. Писаревский «Эмпирический анализ каскадов обнаружения ускоренных классификаторов для быстрого обнаружения объектов». Материалы 25-го симпозиума DAGM по распознаванию шаблонов. Магдебург, Германия, 2003.
[2] Ojala Timo, Pietikäinen Matti, and Mäenpäв Topi, «Мультиразрешение Gray-Scale and Rotation Invariant Texture Classification with Local Binary Patterns». В транзакциях IEEE по анализу шаблонов и машинной разведке, 2002. Том 24, Выпуск 7, стр. 971-987.
[3] Kruppa H., Castrillon-Santana M., and B. Schiele. Быстрый и робастный поиск лица через локальный контекст. Материалы Совместного международного практикума по визуальному наблюдению и оценке эффективности отслеживания и наблюдения, 2003 год, стр. 157-164.
[4] Castrillón Marco, Déniz Oscar, Guerra Cayetano, and Hernández Mario, «ENCARA2: Обнаружение в реальном времени нескольких лиц в различных разрешениях в видеопотоках». В Journal of Visual Communication and Image Representation, 2007 (18) 2: pp. 130-140.
[5] Ю Шици «Обнаружение глаз». Домашняя страница Шици Юя. http://yushiqi.cn/research/eyedetection.
[6] Viola, Paul and Michael J. Jones, «Rapid Object Detection with a Boosted Cascade of Simple Features», Proceedings of the 2001 IEEE Computer Society Conference on on Компьютерное Зрение Vision and and Pion and and PAtTTrifornition, 2001. Объем: 1, стр. 511-518.
[7] Даляль, Н. и Б. Триггс, «Гистограммы ориентированных градиентов для обнаружения человека». IEEE Computer Society Conference on Компьютерное Зрение and Pattern Recognition. Том 1, (2005), с. 886-893.
[8] Ojala, T., M. Pietikainen, and T. Maenpaa, «Multirresolution Gray-Scale and Rotation Invariant Texture Classification With Local Binary Patterns». Транзакции IEEE по шаблонному анализу и машинному анализу. Том 24, № 7 июля 2002, стр. 971-987.
Image Labeler | insertShape | integralImage | trainCascadeObjectDetector | vision.PeopleDetector
